
皆さんこんにちはRevolution_includeのネタ&制御担当の太鼓の暇人(@Taikono_Himazin)です。
今回もRoboCup Junior Soccer 2017 japan Openに出場したロボットの紹介です。
![IMG_3427[1]](data:image/jpeg;base64,/9j/4AAQSkZJRgABAQEASABIAAD/2wBDAAMCAgICAgMCAgIDAwMDBAYEBAQEBAgGBgUGCQgKCgkICQkKDA8MCgsOCwkJDRENDg8QEBEQCgwSExIQEw8QEBD/2wBDAQMDAwQDBAgEBAgQCwkLEBAQEBAQEBAQEBAQEBAQEBAQEBAQEBAQEBAQEBAQEBAQEBAQEBAQEBAQEBAQEBAQEBD/wAARCAFoAeADASIAAhEBAxEB/8QAHgAAAQUAAwEBAAAAAAAAAAAABwMEBQYIAAIJAQr/xABMEAACAQMDAgQEAwUFBQYFAgcBAgMEBREABhIHIRMiMUEIFFFhMnGBFSNCkaEJUnKxwRYkM2LRFzRDguHwJVNjkqLCZBgnREVzdLL/xAAcAQABBQEBAQAAAAAAAAAAAAADAAECBAUGBwj/xAA9EQABAwMCAwUGBAUDBQEBAAABAAIRAwQhEjEFQVEGEyJhcRQygZGhsULB0fAHI1Jy4WKSohUkM4Ky8Rb/2gAMAwEAAhEDEQA/APNqmctTEqMHGRoj9PLwH27OlSqmWnlMeAQDIjjIx+RB0OaQfu0UdgR300WvuNqmb5WoeMZ9BoVVneDSkBO617cdwLetpbVu1wjRa35NqCTkQeJhOEJ/NcaJvTb4jLf086azbGvmx49yPUTyzPUSTBIlViOKgAZyB76zd0ZqZd7bfrbRUVBaWBvFXIHYlf8A01Zb1RTbdsbVtJOJfC7FJFyvceuPz1VNZtN3du3Re6cQXbBWDdu7qvqNfZtw1bcah14Rx5yIo17Knb1AHbTS22q8Vn+7C2yzRqMF1jOD+p0BLp1M3nHUuKW4/KIwxiCMLqMj6k768QeJuq4lA6uyCoKq2PqBq01jihmBstMSbauNNO4SaJWGAVUhse/tpwdq1dVSmsDIgjYn3B/y1beiu5aXdO0YJgUeQJhzgZJ++rLd4I3glVjjKka16fDmObOpZdS/cx0advNBOGusMtQLXPe42qieOODeufQnRGtXS2kNCbjUXF5YuOSkaD0+xOs/bzglsu7TUqOI8XOR+etQdNL3Hd9uQoZAeUeMZ0qVjTJ0uJwk+8qAS0BRu3No9PKtpVlpLo9UhxGrTqIy2f4sDPp9NEraezOlVpqpKy7bGt9ymdAIIqmaUxI395lz5/yyBoXtzs25mC5CyMcL7autdLJNSR1kZ7rg9vXRfYaM5H1QfbqxEgwrju7b2yrlaQbV0929bagHJq6GndXxg+UhmZSO/rjOqFsvfm4rFeJdrVdRTQ+Gc0kkNHDESPuVXJP31Ztt7kFVH8rO+c9sH01WOo23JIpIdw2qMmSBgW4A5A1ZpUqVMYEIL6tZ5kkpv1d3vuWosqT025rzSSwyjxBHWSIGGfsdXbYV9qayz0tRVVM1SXiGS7lie330Md72ncd72e9RFbKiUsoYBYjnVy6VxV0e2qRa6naFkQAhyAQRp3VKIxqH0UW06p3BV8Wtp1LkAKfpqs7megms1wjusavTPC/IMMj00tdYGps19RVRxxqcj98AD/XVa3pKNx7MuFPZrpRJUtGUHKcYP8tArXdu1sl4RqdtVc73SsBXCKjoN/ubd2pkrm8P8s+mtHUUqyUULk+qD9dClOhG6Hr1qKvcNmikSTxGzKx98n0GinTvYLVSRUlfuejEkS8WIydeY8fAvHtdRzE7L0jgNVtmxzaxjbdUjqRThqKVgPVfX6aAFHUy0VaZImwQxBHrnWndzzbEuVM0LbuiHJCDxQdj9e50I5NjbDWqdn3XPIpYsOCqNXuCl1GiWVWn5Khxl1KtV1U3Aj1VflvNXXIlOzBV7dh76mLOisR7/TT1LXsOlcEV9XKF+/r/ACGnVPddp0bkw0s0ijuMsdazpcIY0rFho3IU/bogVVM/TRc6fUnCJZT37jQSXfVqgK+BbCSCPU6m6PrlW2yPwqC1xoB9ffVV9tVdsEU1WDmpChlan3qsa9glc5AA9StYT/pr13j+YrpZBHSzeUnOUIB/LXjZbrzNcp47+QnjzmacqD+EiZn/AM9HSb+0s61iIrT2iyROOxYq7Z/rq81h7poAnJ/JB70MccbwvSdLVcJOwppMD6jUhS22qjTg8WP115XVv9ox8RFQhSGvtFPn3SkJI/mdVut+Oz4ka4sTvZYcj0jpEGPy0ix8+79VLv8AoF68SWqUDkOA/Nhrpbi1DXRyTTwKuSDmQZ141Vnxg/EVW58bqXcVGe4jVF/yGoO6fEH1ouZL1PUe+ZYd+FUVH9NMaTzyTCuSNl7TX/qLta03ektFdXky18jRo8KeKsZGPx4OVBz27afzXjbgchNx0zJ6chFJn+XHXlf8G2+Ny7j3/wDs+73auutZPX0kq/MVJdkgUSeIw5Hv34ZAydeh0cxZmHhkD2PfJ/T20xoaRLsqHekbK13uewXOgmo49zCEyKV5rRyNj747aANh+F/ali6iN1AqOqdwrJDKZfllspCHPtnnn+miv81Tx9pGC/4jg/11S+sW1qPqd07uuyKTqFPtOprTEY7lQ1KLNCUkViPxA8SBg4IOpU6TASRGVP2mo1paDui9FcrAY1CV9WQFx2pMf5tpVa20N+GorCP/APXA/wD1aH9t3LtOx26loavelrnelgjhaoqrjAJJSqgF2834jjJ+5OlG6rdNaQ/7x1B2xFgfx3enH/69EbasjZD789UQPmLawwGrTn/6ag/56Fe5Ph26a7rvVRfLjX7nFRU45COeFVH5DidPJevXRem/7x1X2imPb9sQH/JtMp/ie+HykBE3WTaK49f/AIkh/wAs6Z9hRqjS9oI81Nl4+kZa6FCVXwedF7h3q33TJ+VdEpx+YTUpQfCp0YoaJaKG1XySNf4pa9Wb9Tx0lP8AF78NVPnxOtG2fL7LUM3+SnTVvjc+F2mPn6v2h8f/AC4ah/8AKPVqo3vqQpVMtGwwhUqwoVDVpmHHchd0+Hn4e9wT1VmitlbWS22QQ1cUF888EhGeEgTurYwcHBxp2fg++HWoi8Kq2JWzqfaW8zn/AF0NdrfE98DPTq/7q3PtPeoguO8bj+1bvItHWzCafBGVDJhB3Y4HbLHU7L/aH/CzT+m9blJj/wCXZak/5qNVjbUGnDRjyVkcQrxHeH6q40vwX/DLTESR9LIuX/NcZ2x/XT6L4PvhtjIP/ZPQOfXz1UzZ/wDy0NJf7Sf4YoARHd9yzf4LHIP82GmEv9p78OkeTDR7xmx6cbSq5/nJqcDkhG5ccklG6k+Fr4fKJeNP0lsoU+oLykH/APLS0fwxfDzHI0o6L7WLEdy9Mzf5trPtR/al9CoiRT7S3pPj/wDawJ/nLqNqP7VrpMhIp+m27pe2fNJTJ/8AqOk10JjUO6N9j2V8Kt26lX3pTaelu1JNxbao6avuNP8AspuEMU//AA/3h8pbGCQPTI0QoOi3R6nAEHSzaiYORi2ocfz1jZ/7VjptT1NRcbf0SvnzdUEWec1lLHJKFGFDMFJYD2yTjTOo/tabKr8afopcmByf3l6iH+UZ050k7Jm1nNyCVvOk2htKi4fKbVs0IiwUCUigLj6DX2d9myTGnqqKxPIrkFXgTKMxyfyPvrAtF/auVF0r4qGj6KeH4rBeUl8zjJx6CLUD1E/tM9yUQlt9k6VW2nnqoJD4r3FyEZgVVmVUHIj10wDdoS7xzjJlZp+IfrtvC+9a97VG3t0VdPZIdwVsdsp4W4xRQJIUQIPp5c/roQXDdm4rpUGquN6qaiVj5nkfLHTKcyzySVErcpJWZ3Y/xMTkn9STpFoiv3zqWhhJwn809bct94eCbnOEPtnTc3a555fPTZ+vPSHH1z66+FfYnsPTSDKY2ClkjJS0l1uDAlq6bJ9+Z10avrpP+JVyt2/+YdJkDGGH+muoAHfHfThrdgE0Su7Vc7DDzSNj6uddDK49Wbv99fBjBIwPvr579/TTwBslAAU1boZpYRwgdiD7KdL1O27nVOhp7dUvzPEERnXdd8X1UMcLQRD/AJIwNfP9t9zhOAubgD+6o7aCe9IwAnBaDKM/Quw1e0Nz0sUoYxXOLhNzGCrgZUgfzGiHvO2RpT3SzsByTmF79iMcl/01mKwb83DRbjtt0qbtUSLS1MbOC3Ypy8w/lnWrd8GGWrprrGQ0dfSo2R9VGP17Y1mXbHte17uaPTcCCFm6bZFXcF8UV9FECxI5P7aZv05iSQtPua3xfUDv/rppv+gqbbuKdZA6JIcp3OCPbH6Y1BR9yMhT21oMFQjUHfRBBbsQtB9G92bX6XxyJc93xVFPLk+GgHkP89Xy7/EZ0wb/AIdVUTA5zxQ/9NZIEXLIPY410eP+LH2HfV2nWrsZpDz9FSqUaT3yWoyb16jdNtwVS1EdLWsQcnsRnUptL4ibHsyn+Ut1gnnjUeXxGx/mdABvK3HGRruuB3PfUJqTOsqYawCIC0BePimFwqFqIdpRI6HsXYd9KS/GHuVaI0VNtqhXIwGLZx/TWf8Ahlcgd9dCvcBidQLS7dx+ZUw1rcR9EW5Pib6itKZIJaWnIOQVU9tNaj4j+q9YGjkv4COe4Efb/PQtKBe+c6UjY+4/LTFqk0NBlFab4kerk1B+z/8AaULHjGFhHp+uqvUdVuos3MPu2vTl7I4X/IariRqUA750lInrgnQ2UKY2aiVXlx3U5Ub+3pWU4pqvdNzljPqrVDY0z/bt7ZQDdq0g+wqG7/11GJkfl9xpaPHucaJoYMAIUpwKqrlPJ6iVs+5kJOunJhjuT37576+KFBJJ13LAjufv6akGgbJvivoOe5A7a+/Yjtnt310DkHGO2voJJOPXOlEKIM7rueXoTrgJYZHYD1z9dcAJYAg5Pp9dKGCRI+ZjIXOM/fSJgJHC6EcTzHt3195HOFA1zkWyAOwGvqjA9iPrpSEoKIGxbf8AN0FCOBy3zSjB9SGY41QKgESyKcghmHp99F/o7RLWW61B8ZSvq0z+hP8AroT3GIx3Krjx+CeRfX6MdConBB6n7olUQ4R0CacR2OvufUf5a+lWx7d+w11KeXP30YAIcpPhg5DfppSQHHceoGucOR9B39MaUkRiASdMTlIdV8pa+ttdVHXW2rmpqiE8o5oZDHJGfqrL3B0VN/bs3VLtqmk/2lu/Iz5ZjXy5Pk+vLPtoTmMZCd/MQMjRI30p/wBkogeXFbgETl9BGdM4AtmE8A7ofS3u9VAxPeK+T/HVSN/mdNnnqX7yTSt9Szk5/nr6UCgeX89cEZILLnA0hA5JgMJFx2OVU5+2k+Cd/wB2nf34jThgO4799deOTgnPp6e2nBxlOMlIhFH8CZ/w6+HkCD9vbS/h8cHt+evpXJ7nGBptkpISBRh5ifb0zrpwbIGD2HuffTjgxHfX1owr9jkHS1J8ymvDsDkk/nrr4ZHm74/y078NT9v09dfAgznv+WnJkpkhwLYzj/rrsIRn1xj3++leAXvn79tc9iO/66jGU8pIxd8emD7a6mH+9g5045ZXtrq3p3PbSG6ZImPsQR7aTMf2BOnLYJzkn/TXTwyxySRn6aUqQcrH0+tzVN5adYlYUsLztybH4Qe4++SNRe8pHqNwVCuwPhhY8/kNXvplZporNcbq0eI6hoqNZP8AE3Nh/wDbHofXg/OXWsqVyfEmkKf4eXb+mma7MqTgW4IUV4OewxjGurQKGBOD29M6etTSKAzRn6a7GhlBBERJP0HfT7qOqMKPliVh2A7aTNMv5dvTU3BYrnUHMNvnfH92MkaeQbK3JVv4cNmqiff90dLWAIS1c1UzDnGBka6yU8gzx/l9dXmPptvCV1iSxVIZjhcrjvqdpOgu/wCpCk2opy74Y+mo981u5S1gboSNE69wO/210ZWAJx/6aOVN8Nm9Jkbx4kRx9R6aWj+Ga/eJxqqyNB749tMblm0p+9aEDMr3Ix212UZB18CE+YjP2Gu4BBH+ujloSk7LgwSQRkn6a1JtrcZ3R0usk1QwNTbf3UhPbCgcP9FOsuEMD7d9GnoXdPnLTe9sVBZzLCzQpn+IjIx/5lGqt3SDqc9FNriDhQvV2kEzUtxiXtxCyNnPmBx/ljQ7ifI+ujZcLbSX/a13iqY81KU/jU6+4b3P5dgP10EYgVz6g+pGdStoLdPRCfMqQgYMe/8APX2UKFx7eg02Rmz2z37Ae+uzBhnPYDvk9u2rUAoZJSTqvLt2OvoHtxPr/LX3IdcowZR7g5GuKuDnJAz21GJUpC7ZXJAI7af2yzXW+SeDbKGWcp+JlACL/iY4Vf1Ok7Vb2uNWI5GKRIOcrD2Uev66NnT/AGA24KKO53d5qGxocUtHTgeLUHOARnsMkHzHPofXBOlpaAX1HQBz39ABuSeQ+wylSo3F7W9mtANR5n3QOp/QZOwkkBDUdKt5zRh4aWgnJGVSO505c/kC4ydSKdA+tBoY7lH0t3LNSSDkssFC0oYfUBORP8tEC/br6QbXrI6Z6CqvVXQscU1FUMsKN9JZyQ0pHuAVUf3BpuPiVko3U7a2XTWhVOSIat2Eo+kiOGVvrkYP0OovNMu/lk6eeM//AFH/AC+KJd8K4lZ0STXomqPw+IDzGoaiD5Fg84QaqqSutlTJb7hST0lVD2lp6iJopU/xIwDD9RpIxu/dfca9AOnr2f4j9pUUW6OndZdkZTA1HconlmhkC5EtFV9pkib0/wCIpjbBxUISFuOzPgv+HnprI906m11CyeI0sVNfK5amSNM5VTFGFRiFHclO+CcDWVecZs7SuLcPD3HYNkn4jcHqPkSMq1Y8MvX23tXFWC2by1uHi/tHvEdDAHmvMsRr3Uuox6gN6aUWEYPnGB7516rbl+If4GtoWz9hUK0FxSHASG22yOOMfkQoH9NDmq+Mj4UKOB6Sl6YvURN34NGMfy4aG/iV1qijbOcOstH3IUmu4KG+O4fP+mkXD56l53rGcZUAjv3GlFViSrD09RrYm8eq3wS9T+dFeOmFXtuplyqXWzymCSIn0bBTg4+zdj9tZ36mdNJNhVcVbbLtDf8AbdeSbbd6dOKyjGfDlTJ8KYDuUyQR3UsPS7a3T62K9I0z5wfqCfrCp1DauMWtQu9Wlrvkd/gTHOFReBKhguQPprssYGMEfXXeOfipXHY67JVKikFQc/XV4gjZBkbrkfONxImAVOfT10tJJNKnA+h7kabNLn1GMa+iZsHPfGmLJS1zhdxCPXA9dcaPHc479/TXwzty75GfXX3xi3Yg/bS0kpAgo29BqBqmiopR6RXWo5DP1RMf56Em4YVi3Bc4/dK2cfl+8bR7+FuprqexV9xSKGaOmr5oQk0SyKgkgQFgp9+5OfUEA+2gDutfB3Pd40UgLX1Cjv3/AOI2r13YutWUHkf+Rhd/zIQKd2y5q1WNOaZa0/Fgd+aYcUAOfr7a4QOxHbSXMn699cLMykkHA7fXVGDujhwXYBQc9ifprs4GO47Y9PXOkfMDy99KN2JUjse/ppZSBXaJfEqIYlyWeRFGPXuwGi91bpIKHZtNEUMcqXmSMxnGVCxn1I99C3bVN83uS0UjRllluNKhUDOQZkB/z0XuvyeHQrS0sH7iTcNe8bYwTjy4x7Y9NSe0ihI/qb+aTHB1Qh39JP2QRLKT5fb+mvjMf1B7aXjoayQkJTSMfTAQnT+m2buqsb/dNvV82fTjTsf9NDI5p9UbqFbt/nj767wQz1cq01PGZZX7IijLMfsB66vlr6J9Q7nF4o2zWKh9nTiQPr30aOldu64dK7fHQdJdk2isvdfIWqZ2s619Vx9lLOMIoGBxX8zqndX1G1A1uAJ2yr9hYVuIVNNFhcBk6d45oO7d+HvrVu22td9tdNr1cqWMlS0Eakkj1AUtyb9Bqj3ey3axXCe03u2Vdur6c8ZqWrhaGaM/8yMAR/LWuhuDqttmpjuvUDY1mtk9Sxkc0FxNurJWLHPGNAQrZz6gAa0RcrRtTqhsKhO/+n993NQRKij9tRU015tykfjp62AkVEWfWOTBx765G47U1eGXQZeNBpu93T73ykz/AMV0d92eoCkKlqXA5BDwMRy1DBPrC8sRyCDPofr9ddeGccQfvrb9b8OPws19a1pue6Ny7IlNQ0VLdZCKyzTEnypLlfGo39iJCQPZiNTdw+B3au0JIYrxLJVQToJaarim8SCpjPo8br2YEa6uhxC3uqQrUHS0/vIXKVqT7d2io0grAjRsB6Y767LEznshJJ7Y16AJ8NfSOFlmFmV2Tt5u+dTVH0i6cUMa/LbcpVZWyD4Y0X2lvIKqaoleeVJt69V7KtNbKmQt2HGJu+rHbukW9q2dYf2FV8SueXhnGvQg7esFGIxBZqRVH0QacSSUUMgEVJCmPTCDQ3XLiPCEhWA5SsFUHw79Rq+maaKyunmwoc4yM6nrP8J3Ua5NiqWnpV9+RJ1tda44PFFUfQDSMtfM44/hH5aj7RUUHVZWU6H4Nr1nlXXyNF/i4KO+rBR/BzZgoNZfZWJ+hxrQSPIzFeTEfY67TxvMBwcggaG6u9oLiUqRfVcGN3OFnLZOx6NLxHsijkBt9PW1MrSY8zKF8P19+2f56t//APDX0ypnGKIsAPcnU7tmyQxb8ujxdko4vBBB/iJyf651dnpyxOc9tCpVXVGB87q9xUdzdvpN/CY+WPyQ9peiPTWEBf2KjEemV7alqfpbsKnUCKwU5K+7KNXBIo/D4MMEe+kRAxJ+hP8ATTyeqzy8qFi2rt2jIEFkpVXH9waXS2W2Elo7bAhxgeTUrkDtjOO2vrOnHiUHf3xpJg47FQU9DTlgy00YP1CjX10lGOPc/wCWpaSiMjB8HHsNIyIwcoqY9tKAkVGrSMSS5IJ0yqaCGQt2OTqfanYKRy7/AG10Sh5dmGSdMlErzFVQD39NdsLn8Pca7DA7Me+vpIz9sa29irsr54Yx99XfpBc1te9aTxGCrODGS397OR/lqlKRnBwMae2i4yWy50tfEeLU8yyAj2wRpniWkFO3cBaDpre9HvOpsMqJ4dTM9Muew8OQckYfzXQK3JZanb24q+yVKFJaOoaIqe3bPb+hGtD7sqzS3az7lpCk6vSxPz4+rL6A/XtgaG3xE0nDfUO4E80N+oYapSB/EBxYf0GsqhXiu1n9QI+I/ZV40A63cTu0j5H/ACr/ANIuiHTqy7Ro+onXm/2yzQbgi8XblLdKiVYJ4sZE8iQZkfl24oCAF8zeqjR66IfDt028TcnWOq2v0/3PaNsWlquyyWu8vVWmtr3fhGlZTSZePwyQ3Fh35e5GgH1f3HT9Rfhp6cXalTFZs1YrZVhfenenSmVj/hmoyD//AJl+unfwSb/tu3r1vHZV6mENu3VR25qhyOwFNXIzMw9wFkJP2U6s1rcXz2U6j3Bjnsa4N30l4a6D1glYFsSKdxWaJrM7wtJc6BAJaC2YiIO0yZnZWbeFFaOsFS21+re2NobP3NXNx23vDb9EKO3TznulFWxKBxV/RJCM/Q+zZh3nsrc3T7cVVtTeFnntl1omxLDKBgqfwujDs6MO6sOxGtdUMWyetNmuy7FsS/NUyypubYavyqaMoxElTbQe9RS8gW8Jf3kRxxBGF1V7ZY7T1AscPT3qhdK682ShZotr71ok+Zr7N3x8tWxfjkhzjI9VI/h9QM2b7JzncPYXUx71IS5zPNgMlzercnmOh3GXDbykxl2A1591+A143g7AHpt0PVZ82vbGq4aenSPMlwnCYHYlQcY/now7ppt/X6Km6b9N7BX1tVHTiSvqKZOEcMLAAI0pwichjJLDC4Uep0R+gPQLb+2bjc+oHUSso71Zto1Mlps1PSswp73Xqzc5snDfLoCcj1Y5HoDmX6qfEdf5uodBsi1WiOqehRJJ6cU4+VpsgNHAsC4ByGUsR6cgB76Iy/oXLO90l1KnM8tT490SPwtjUTGmYyTApU61xZ1vY7JpddVvdAkhrNi8gZJOzYzExvKA+3PhG6sX66xW6pqdr2mHgXmqam9RSLEB7CODnI7fRUU+nto37B+D/p10/H+3/VPfMVwsNPhqWR6BqVaqRe7eBBIxeQA+jvxHuQO2rpe7nsy57Xk6p3Kpr4ZrnAtDR2WiBb5avHr4eBxSJAvPAGfUDsewN6pdUrrVbytp6gQncVnlpI6ZaStlmSCo8MlXhLxMrL6KexB75OdYQvqvaum6nw9rqAaYe0wXHlDHYEg4dj0JzGy2o/s5cCjSdTuK7mtcKkENpSJMsdIc4CC12qBMxMLUsO+txb52bV2/oNurZeyIY2MEMV0mlWoqY8dpHqo0MaZ9AvIazJvPYXxQdO+otmvl0W8XC9PG9xoqm01HzsUiRn95LA0X/FQZw4UFlB7jB1e9l1Hw3Us9Duqy7Vp+nNc/ngmtW/qukr0wceaKVZoWUkHCyEhgO4wdTE25brct5Wy5SXimsUlsua1du3VbUilpGbJCSVMNLiBZGXCu6oinJyMdtUeEcUs+DXPsppBhmCHAGZwZcHPk9cgjyWjU7M//ANPSNzSLn1SCdb3y55/pAcGwTyAbv12ObuqmxaLcNJL1O2XRQ08dYJKm52ymjCLBIO8zxIuAACeTIAAFbkoADABrkMd++R216Rb66PXymra3q1NcLDfrZPWo+5qPbNDLQTWybB8O4tTNyIDB/wB/xXw2Vi2CrsQKqD4Fds713RVVdP1J/wBnLfcYjU0FppLK9bVCTsZEiVpYw8IDLImMuY5EHHtk9/UFI0RcUjLD8SOoMcxt5yDzIHIW9tc09VtcDxsPPEjkY+h8x6LGQ9O/fOiN0p31Q2Sol2nu6k/aG1r1iCupGbjwye0iH+BwcFWH4WAPpkG3XD4Tt3Ve/Jdk7E3ftbcqcitPWSV4tJcr6xyQ1nB4pR7oeWcHiWxqbqPgR+ImzRRXGr2lT1Fvc8TWW+ujroQD78oS2s6pWoPboc4Zxvz/AF+qO+jUokSCCMjG3n+/RC/d/SPclh6gU+xNv0VZuCa7tG9iNHTNJLdIJT+6ZEXJL+qso/CysPQae9Q/hw669KYKWq6g9Lb9Z6audY4J5oVkhZz6IZI2ZVf/AJWIOtp9G+jl4a2yUu/LjS22PZNpmrKXcbl1NHFUco50JRlfJCkKoPmMjDUf0k29W7Rtl7i6nb1nfaG5ayGht9ot8bTSV05dJfEh5E8I41PeT8WMjuRrLq8Z9goHvhLhgZy7OIHmBnYCDyC3aPCKN53Vdz9LX7gAktjBO0ET7onUQRMbrFu/ekd/6fUFsuVbd7Hd6a6FohLaKxqhaeoVQzQS8kXDgMDleSHvhjg6pZpplbwnjZT7gjGt2UnSap6idZd0bD3fXtYLRYaOfc1uoasO7LAGjUFSF5PGsRLE8SwDAkYBw+2/0X6HboiqKqgeC6MG4u8YbBwcZGQMjt2I0XhvE/aKLXVMkiZ5Z2zsfOFV41wpvDbp9KlLmtjMdROYJ39YO4MLBHyz8uI7n007jst1llEMNuqXc/wrExJ/pr0StnRnpdaAEp9q0mR3DMgP+erDS7d2zSVSTU9ipEC9u0Y1f9rHILCNQBqzp8I1grYrberbW0EyPUMzGJ0wwPgt3wfsAf00KLr0G6kbj3Nday22CQ01RWSyxSuwVXRmJUj9Drc23rJFHufcV5pqeOGAUkQUIMd/CcE/00tbKsLaaMRxgYpowCB9ho91xZ91SoU/6A4D/dP5pN4cLDXcAR3pa4/7Yn5ALGtN8HW+pvDb5mnAZMtn1Vv+mpu2/BXud4ga6+QRxn8XFM/y1rKGebxGjLkF/rpSaqqIUEOSyn11R7+rESo99JkBZytPwTW+mQy125ZJWcY4hVAGrFafg/6d0EJFymnqZM55GTGjbFUurYlXIA9tN6ipeSXyHt9NQNWodylrIQX3N8O3TjZ1sXctmo2FfSVtFNAxY9mFTH/pqS6X7Z2vvuhudx3PRQ1hS6VTQiRQeLGQ8j3/APfbU31nrZ/+zW6mF5IX50yhlOGGaiMHH6a79L4blNSVXONRQQt4NKFjC/xuzZwO58w7nvohrE0dBPMH5Ap2NJ1PHT8wrZT7F2LbwqUlholVewPhD/pq37f6fT3ake62uxUUFBE5iNVO6RRch6gFvU/lqANPwiL+IpAGRo57jo7Xt/atHSy0UVVbtv2yFYIJRlKivnHJ3ce+M+/11n3dz7LT1nJkADqSYRKLGv1OqGGtElB3fVuXZdvpa15LRcpa6thoKegoa1HmqJZGwFAHcDGct7DVn3L1T2p8NvSubcttsdvnvrxPSW2NO4q6oNmeUk9zBCWwT/G4x9NA7a8tZvXrFdt33VoLZYtoW6daGqSNVRZCWWWoAH90o4X/AADQv613mv3JZX6hjwJtrfLfsK0U8E3jfJxxqcJKv8DuWDnPqTn21zt3cmreBtSAGkNHQvOf+IyOp9F3fDLClSsAcgvBe4Dcj8LcdfePl6I1743VtDeeyqPqPuRqaj3BdUggrbobYk8CyMoIaUDvGCO2V+mrPSdKdt19qrOpOwrrTx1VvFObhS26YqkLqgDyRhMB42PcgjIzn21QvhRqtibk2zYdu9TBytSUTXKeTJVvGoJQyE/UBZAcfbRWqL3b5OpP+2dh3Fa0tV6hFOYRIkP7Qon8isyDHKTLE59e2h2kVLZ77j+ZGoQQDlh3GJzHU7roeIMq8NovFpVcx+Dv4CDgM5g+EkxHJvI4q892rKi+09y+WoHugHDwrjCklPcU94ZGI84I7AOCRn1052bJ/s7frh05tc1TLsa+UVRe6Cz1MnOr23URuq1MVMG7vHE7qxiz3icFfQ6hLlfNp1VmFwve6qS1FjLA9O8KlQUcqcMT2YEHB+o1V23LtvcfUGyja29oId6bWlFVZauZwsdygdOD0lSPQFkJUN+We2j3vecGpurWztdJ3LctIGD/AGnY9JlYdrT/AOrNDmM0XFPJaMB46tHJw3LdiMgbhF7a+3LDuzb1zudsq6yguVDXGgmoq5lMHjiLnmCXALIyjkM9wGwe405runL0FZRUVZeIUU0vzdwlWMlaJMZwx9zxx29SSBoVbh3Hu2noNt7LNdI19mrJ7zLxX5cpM7FYklA9FjiUlz9APrqzxbxpJ6e69P1NbcblQU1JeRcTIf8A4lyLrInA/hVWVgg9cgH30Kzv6tXRTZUPjLiJydMn7fh6+gKxrng1ClXqVtAaHe6yTEwM+QJkAfEnIJsF4p9v3HbUM9mpbfaRLUqlL8z41RdKpAcGR0U8IQ3qFIOBj01AXGis9PYTd6KoudSYX41Jlt7LHH2z2kXyt+XY6mKdBYaulit9jjvG7KtDVW221DlYaWMLn5mpC+YjzeVB3J1Xd/3TqHftuI91uddVGzypW1EdLTtFAqA4kHhIMKApbAPftrcFH2WmfGSRnJ5chnr1nfYAYVOzfaOLaV7R8LjAIwRnJmDMdI+KjKOM1aJVwyiSGVRJGw9GUjII+2nQRsGJk/XTXYFZPU9LqehvMng1e2tw11jp5Zl8MyUh/fRISfdeZAz7dvbU1FS+LmMdz9frq60h7Q4c1jXdv7JcPo76SRPoVHxqsb+GOIx7/XTK8Uc84pqSGVo/nauCnLIe4Uvlu/8AhB1P/IEdzF6dsnvqW2btebdG97RZkcCOJ3qpGI7AAcf/ANR1csqbatwxj/dkT6Tn6Ko5xY0uG4VTqqaCO81y01HT0/CTgxSMK0jepLH1Y9/f218WB+TOT2GpqK3TXS6VtVTU8s3j1k7r4cZbK8yF9B9ANT1L003lc0Pye2q5w3oTHxH/AOWNNdRUrvNMQJMDylO0lwBdkqjVNLIVDLjA79tN2ilVOS5we2i7b+gPUWrKiW1xU6t6mSYf5DVgpfhh3JIF+dvdBAvuApY/5jQhSeeSnocdgs/JTuo7Duf66UWlZs8zj9NaRh+Gnb9InK97xA75PAIgH886UbpX0Qs4/wDim5xPx9Q9WBn9F0u5dzSDC1ZxiikK4K+nuRr5FRvPJhIWY/8AKM51pB7j8O9hA8Cjgq2X3WJpM/qdJTdcOnVqHCy7NZivofCSMaXdgbuUoaNygRRbJ3BXt/uVjrpuR7cYGx/PU9RdFuodc6NFt2WMH3lZV/11fq34m7n5ktW16SmUejSyZ/oBqs3D4heoVdyEFXS0q/8A0oe4/UnS00xzlNLAV4w8u2fr/lr7yycHufr9RpxHQ1cgxFTSvj+6hOpi17K3HcnRorHXSAkdlgIyNapc0KyVAnsMj0Hvrsqj7nPr9tFm1fDxvm90EtRTWGeFo8FRL5S2n1q+FPqhcDxelp6Ye/JyToQuKZxKRIbCue3IP9quhtuvEbs9XaZ1p5Cp/gyVOf5odU3rBE9w2ZZKieImS3zMiuO58Nxgj+ag6NWwOnf/AGO7Bvm3uod9oYIb34jW5mJ7zrHyKAe58oP89Qdg2NRb72xT1FyulGbNWXEUYeGqWSRJMZYFFPJP4fXGdYdGoO+eCMMdIPr+4V8jWA6mZ1DPwQu6EXGjvVFeumt1DzQ3GnlqKeJe7SpxHzMSD3cKkc8Y/vwEfxarO3YK7pp1QpaO6SApBU/KTyofJPSVClPGU+6tHIJB+Q9xrXO1/hg6cbeuFJeqOpqkrqGdKinnWUho5FbIYd/rqSvOytj2jqBFNuKwUNTaL8vCgqJIx/uVbyLNBn2jcksg/hLMB21bq3LWPLfwv+h/z91Vt6Ot/tduJczL29WjZ3q33XdWlvJpWO93PuHavUyW/bcrq233KKeOvpquido5YZ2HnKMvcESBx/TRwtu/qLq3C1x6g2m77K6gJDmPeVit5aivDqPIt0o1wvNsAeOg9SMgaL2xtv7boN7bwsl1tdNUCGtiuFvZkDEQTJyZe/0fP89c6q3OqjuVBtGz7eaho/2rbKe7TvTlCPmHEkNOuR+Jo1Mh/wCXH11q8Uq+0Vat57sNNQnaJAdH+46QOqp0XvsWNsGtlphoBzI5Ez/p8Uqaq6Co/a21emtsR5ltNJBFUxRoSGq5E+Yn7e7N+6X/AMxHvqFuMXS/4Z467cW43pd09RrpIZpo5GEiwzMc4lK+pBIxEvYYHI66by3ZcrfuLe9Rts8L1T19R8jMjlXMjyx06xpj+LgjEe/fQLpei1TuKtu3UbqLulYrNtpkNxWKctJJUucx0kT44l2wWY9+KgsfUa4ocPfe0aFpWqFtMMaSwTNR7gHmSM5c84xJx5LoODMvWVb3iFhThof3b62AabWyAxhOGgiJcAXRgYVkt+6d073td5sFssFbXXi83YXNVpIIwlHUqXFQCrFUTAk9PRff002uHTS2btp/nb5LUVqQSCGjp6KVmNbPzOTEoGGQElTI2Ac4UHvhlbt8T0O1dwCgpqRKO2RSSNTUZaPlTVNSniHxWHMq+YS2cMyqPTODe+nt0lk3bWTVNrirEoESOmgniIWJ/mI41eLiRxYJIQpGexP1OumpUrPh1pUo2zQarhLzHuDwjS0bFxwZyByzMWLK5srS8p3dwdTWl4pUxBDtyTUO4YJ0hs6nbnS0CR9vLZFgsIYXjbr0E3DiqU9odAoHY+d1QMwPqw99fOm9o6O7ntku2boptl+p3Z6W40g+UqqvJxwkUPxlBHbiCDnBAOSNVbrfvz4iNs3NtudVEvVjkqImEUM9IyiohOGBWVsiQZ9eLEDODjVPtt5oL3TQfta3pUBXCJLy4srgjysynkoPs38/rqzYWttRYWveQDzIDh8ecemr0TcW41fdoagYAxjvwgQzI2AIhuozA1aQdtWyPFR1mpeje5It0dHd33Sc7egpIKoyTh3ZCWVlkj/CycuPkBAHJsYPbW2umvUbon8Tu0FvkW06G1bxoI46mrjpKbEsbMuBUxKMCVDw8yjDgL65Az5nx7YqrnFU0dFDLLU18MtLG8igTyczlIpT6OyuuUk9xzBwfQydJemW/Kepj6VWzdVJt/etRdbbQ0N0t9b8zDBVqrVEZEsR8ycSVYr3GWGDjGlX4Q6lWNvSdpLgSC04OJDhuCD6Qs6txu84ge44rLtB0lzm+Mf6HbEwQcOkjkRz2TvPbMe8LPWbI3hPZpLlfaOWO21c1Sua4oCImEjYMjK3FkcEyoRxccT2q+x7P/thYd1UPWLeN5uVytVEtKKdLnPbobZIqcVCQQsoMnJRh2BBx2A1R5utUlqutX8Onxo7Vis9yqsSw3uhYGirW9I7hTSqMRSg/wDioAMgrKi99VW70259l7tmgvU0G47lYYo56SQ1DxQbrssgIiBZGzkjtjJKSoBkjOeWdWq0qwpXMT15EdY6jnv5EhdrwzgreJ2b6du+KzQXM5h4G4DsQf8ASQD18rncKertElg6K2neFxukG7LhS7oG5KpvGEVPGjRrHWZJ/BUo4fH4lUt651Xel9j3ru3eG2jSUM0z1rSVlss9I4aG30yKTGpd8CMszcyT5guM45Y1L7bqrfvy+Vu5kulPadt0NtpLU1zjixIvzIM9QtJGe7SuZRTx5HlDyHBOMkrcls2/WwpT7VuVVt6rt1VFTiS1sZDbVgBxTM4PnkLSF5nBzz7Z8usy5vKVxe+xCnqdBDj/AEt5idpgjzAIHPJ6dGx4dZ9+92uo5shswwOI8JMdB0E+9MeEqubt6QdQaLr1U37Y9xqr9vmyVVHcoZ4JSsVLDHDiSnl5HHGZEnQ5OCVA9wDdNzPtq37p3BbYtvxTWaG4TQxPSZgkpWJDGNXXsCCfwkemjf0kt1ytVhqV3NuF9wVUsyypVRRGnkkTAJE5B87A57+49RnViudhoava932vtm3QW03SKQnwI1d5pTkjkXzkknGScgHsRga6WlwptW3NKrsSTG0TsBG0YXH/APWa9IB9Aupva0NBDt4J97rgkD4eayLPX2WY1D2i8yVlPRlRV01ZH4Vdbw34XkT0khJ7CVMge+vs8jw8VABBHqdSN16XUVxS4U+4eNPerROKYUYkZKko4Ik8OVD2A7Arkggg/bXxenG6ttUcST01bXWNo1FBXzU7LPER6wVC4wWAwVkHlcfQjQbejUsnCg9xc0+6SMjyJGPTb5qnxK5p8Toi4cwNrD3iIAcP6iOTgd43mTkSZzptZJa07hldC0MlKiJ27cgj8gP5jVMsLSRWuiXh5kgVWDD7atk/UOXpntDbw+Wyt23BUWx5CnlYyxJxGfqO+ney9i1m4rJuOX9mVMMdjii+WqkZGjmkIy0TLnkGIZcH0Hv6jWk23OABvKz6lR1Wg1pPu/v81SppJZJCUT1+nbGnEM+V8GSI8vrpx8s8TKxTAGDkactBHyV8+Y/XQyIVLATMeUHy8Qe2TpWCCnEZfIJPrru1KsjnnJkewGkUKIWVI27abkkMFUfrVSGfp1c0ij8wlpyPb0mU/wCmnfSq0b4gt8N+28LfPSiQ08tBUxmSSQyMQZ4x6fu/fv76edToSdj1YlUqJHRVyOxIOcZ+ugH1H6u742VedsWbb9wlSmtNHJOYAMKxnkyckd/4B+Wp0xrqMa5stnPyO3xhGpPe1hdS3G/kta7EsG7t9V1Rtm5WGSS5QiR6WeniWGD5RcAF++efIke/qNS+6qndEGx950N5RaWe009ReC88gWRBT0yokJXPclgTkdtDLoP8VWxvFqNy7ha22S6wUpSeSsrjTRTKSpYEdlP4R39fsdQ/xIfFt0u6o2uu2v09uVNcqi41EMDw2yjlkfw+QaUNKq8T2X0/X21Zr2VvVc3Xs3I9QOY+KnSc+4d3LRl5A+oUx0Tu8O2emK3mno4Jam8SmmjFTCrh4YUCkspGDlix7+5Om9D0auM16XclrqttC0XirSpuVlug8CGaSMjg3ABgwILqSAMqQPbVmsexWuuydvXO41L7Rs9ly1TLV03FyWRcxJEe7SFgSR7EHP01ITb5pttiij2hbrZZae4U8lVDuPcsiz1FRGjcWdV9E7+ijGNedPfXezuKDNb3EuJ6EmRzABiPTGF6U0tF0657zu6bCAwTGAAN8+nhBPkAk9/fDha660VH/Y9FZ7c9XTVdJUWionmaiVKlFWTwJVXnHjgCFII9fTQ83N0Futxjsf8Att0luslTtiCFKWvsN18bmIiGAABU/iGcFc/fVjunU+51FQ0MPxK+PVkMUhooECkgE4Az9jqhXj4nN/7PaI/9rS161OWpUlovGZ1HrzAz4Zz2GfXUza8aDS0sbBk+EkHO/uxvzVatWsKro9rbP+rURjAyWJWm21s3dO5FobNFuukqXqZp6+gvNtkSL942ZGSXioU5JOMnv6aZdS/hhtcd423Jtilt1JFZ5+b3unujxSVKE8itVyUlWz258cd/XGrZVfEN1AjqYqHc+yNm7tSeNJFNGEaRlZQ2OSYIYZwfodK2HrZ0MvFdHVVFv3Xs25JlVloa3xokJ7EhJlYY9dK3seM2rgLWkCTycdUiIid9jzJj4LVpXdO/Y1r3NqADBpkBwg4I0w6RGPCekKsXakkai3LuK/mrFVXrHSc4UE0NPTclHlqI2ZSpwMscfhGcas24Omt0Xrxd9x7Vulwsm24NueBPX1UPP90Sr+Ij/wDDABBIfv69gTonbfXo1W2xYLzvm13qzcSjRVe34oaplb1AngdTk59cHVO2LvLqVsS6XLaHT+2z3fp7S1rU1FaNyP4zQwE5KxVH4kGDkIQ6gdvXWnaWdzQe1tWh3RbGCRBAEYOSMHc+SzeItZSq1L2o0vBAaNYLcyIxDdUR7oAxmYlGPojt/YW1JrZDaAtwv9eGnqq8sXqChUGMF374498e+c6Y3K8VXWO2dSdq7VevpbhbJxb/ABJ5wgmZ1JYmNB+H2yfXsdRFi3JtHcF4uMu1vAst3nX5b5hAvYoOICxseDAAYynA49tSu0KXqNs671F5rds7LqquuhWnqruK6aklmiVsojRElcg+jevt6amG+0vFK4pOwSciRnoRO3I4OVkh7b0VLhtdmuYidMRgjbSByicRC77G6YbruFfV7PjekSyxRSyXCaopvGWsrcxszMG9V4OoBznytqPpOmNk2v1Tp9o7rvKUFru9LJLQywyYg+YQgmNGbuoZcngfQjsSDo32rcG2rmpstduCjp46uMpLGlxjVlyO4DBh3z76o+5fh52zuqopzT7srKmy/NxGaSCVamaJ43DYWRM8PTBJ799bx4Uyk/v6DfFieUjG42x81k1OIi5b3FyAQAYOJByQZGTnB8k/m2t0BsWFuV6hqGX1D1JbP6A6rF/3JsK1VF33FsCnjijoLK9KsiqVDzuzYx9cZXvplunodue3VE9bZbVVXC1s7eFJGA0nAH+JOx/XGkLvslphRbaWmNJR+FBJcJchH8OGMzVLebtyCjAB98DWjQNSnUw3KxQRDg4QIVhtXXXbthslvtdl2aT8pSRQ8n4oCyoAT7n1B0xuHxIbpLiOhtNDTKfrlj/pocXKns5rppNv10tVauzUs8iFHdCARlcdiM4P3B1GiNvEH8QzknVVz3twSha3bSr3WdbOodc+WvKwRn2ihA/qc6grlvjdtbykm3LcHBHdRMVH8hjUORH/AMJMjP10m9MGDKjnt2xqBcTzUSScFJVdVcLlhpq6eQ+5klLf5nTVYHLLGXGB7gaVninjQxLj6/fXIo1poQZjyL9x9tRhMJ5JpUM6uY+5VdcVDMoUrg57nXd2ZyQWAA9MDXISUXD92PppinjokHh4HHHKjSc0EbMFTAyNSSqQD4hAJHYHXQ0/iIHAzjt20konIQyoLDsejkC0W3qGPh7eENSNRLa6WVHo6GnQAYACAaYn5V2DohXl6n76Wp0hKMOBYr3yRpj5qMuPNTcV7dVWMBAPXtr41zmMrGAhSR647agJpJJGBSMjie+Pcadw1cMiPFKhYEY7e2kQkCY3VE+ISCW69Omr5WE01irIbiuBnyA8JR+qO2s79C66Kyb9udgqpCqVFLNHEf8A6sLckP8A9vLWt6+zRXa11diqo18G5QvSMXPb96OCj+bDWKJlqNr76tdZVI8MkMqRVOexDoxgl/yOdSp7lp5ghatg8jPQhbwtcd1rrDTXxbTXtRzx+J4whcp2/EcgYwO/fTHctuptyWCrsVVG3g1cfkkz5oZR3SRT7MrYOqTTb233Nsii27aKiGT9nzJBKlXcqhUemjmEoVI1fgvceyjOTkknRE2VTXHfu5LpDsq21VZbbfTPMIquMskS8sjnOjM0bMSwVQGHocAAkObdtVm/76o/s1W3rl1A7T8jy9CDB+SHvTze1Xb+rezrze6iehuSSybZvT0xVZEqYyJaedOQI84yQSCO5Gjj8SnU+ru9v6eWa4S0clVdd4Q3CoK04jndKSMqjO4ADd5AMn+72wNUjd/RWx9QKaK/WS41O1r/AEtEscjXGVaimqbhSyZhkapj4iM/iU8kA4yr3wM6Q+IraFZsXenSee87kgusFZSVldlTlqR0jjZ42YEqwVmPFl7EDOBqrx51V3DHEbta5p8xGoHzkkjyhS4faupXDW1wYJEHzmPohnT317bvzclzqbg1PNaL41ZC2OWZWaR84PphRnP5agd6WXde59rGxbXsLvYrdRy7nudSschL1szl+EaR58SaQBU4YOAR+EDOq3uSortx19/3IqGmo7tHNWU8YB5OFTiJCf6Yx68taF2bP+x9tUElFUz0lb8tHymikKkoV7L2PbVe1qmm9r+bdPw0sAj659B0XS1qP/T+A06Lt6r6lQ45OIaPX/xyPXzWe+imy9wDcN02z1FtdxtDbnoZ4nFRCYpIlbhwkQPjPBhGR9wNHnYe1t5V+6YKi3U3zEkFCaaKppozTtGafMciyS4KF2ByCT3XA/h0W9g2K170r1uNwpKO6XC104jp6+pQCVUc5bt3xkgfnjOiC9nWji8GesJjH/hRjimrlCkTcPuCZD2xHn1+3yXLV7YVCyoPCWkx6EN/MH5rze+J6K69Qd1Ulo25FdblXUMPy9RRMzyvTTJNIGBz5V7MpLDsRg6pFo6bbzgsd9vsXRfc0AsMC0tTcqJJWoI5A4DSSMysJWI7eRivcN2A7+i15g6M7QuFNcLx02QCNjZKKa3UPhmGMw+LwVowkRU+Z81DOcxtkgMBphRdTOj1Zf7bW7LrrnuLctsieC122r3DUS01VEUCGSqnlxTICPKFVcFcoTkDSp3z7QCmGyZ/fqi3badclwIDAAMkbxmVi3aMN4httnvzOxIhjrqZ/VZaWRmQkj2aOeIZ+2jF0oktcHULbD223mnjue6o7zTBHYrFTx0TO45Ek4Lygevb01DdQ7ns+2beqbjR2o2OgpY7haKWkSRpkWWonWYBGPcxmVpmX6Kw9hpp0oessdy2XuevaWa31llntDNGpIomY4kkJHoSjxkE/wB37a2OF39MU/H7zO9DfQtBa0f+2ox5ro+0zKda0pXFT36jKDiep11GEnzNNrATz0iUZviqoLb1h3BY+nb2+L5iy26e8XG5pGPHoacnEMcbnvzd1LBc98DORnQKq7junZdntexr/eEu8Yt0l12bfIDgyUUmfEgdT3Ro5ArGM/hYHjlXGC5Z933egpr5VVF0parckljmud0qKhcA1U0YpKJSQOISNHZuI/ibONEfox0X6fS2SitW4dlQVdko6KSvq9xV9A8dREYYDGDBOSMB2mClAMMD37qCMT2ZteS7ZuQeh/Tqm4RxV/Ca9J7Wag5wBbzIODHnmB1kjYlZO27dN81ce3r3brmtFb6upmudlpgoMcdVIzrVSj25wusgQEZXkCPUZ0FsfrJ022NY7fs6rqKqlWgjZWrGjMkU7u7O8jOuTyYsSSfUnVS6CdH2vW0+lt2qqqBrXZN/XynnSrYJHLSzCFwzFiF48qZwc/8AzNXXrL0y+FmqudVVQb1ktla7k01FtmN6zzZ/CDkR/pk41YtbVlWs9lBo3gwMzvB5nefis3tC9/cUK7DDjr1SZmC0A9B+IfBar6c7/wBtV+z6W70l/oamBleNZIplIcrnsO/c+2NMoOsV+/axkpbTSUlLTuxHzDmSWQDlgkLgKDhT6k+o++scdMtldXaSJ7fsW011XR+JmnqblRrTvHnsclTlj3+mPz0TW6K9RLm//wDMDeNekZPA0tNmNB9R6d/1A111n2cv68N06f7jH03+i8i4v/ETg/CGuffVmiP6D3hP+0QD5EhGW2fFH0Z23cJ5N37JtVNW1ExknmtsSzyO/LPJoyOQOe5OdWat+MWmvchpumvTS+XlCCvzdeVo4M4OCAclhnHuvbQasPSbZ1gqYxS2iEVB8vzFYSxB+pZskfz1Y7xUWbZ0Ak3FuSgtkIAchZlyyn049/Mft9tb9t2RpUQDdV5PQCPrv9AvL77+O1W4caPALJ1QzALzz/tbn/kqh1l61Tb4uu1rB1U6Sz2qi29fIrxLV2edJVmYRkcfBmROWCRkq5PbsNaI6Xb26J3iK4Uuz9y0lIL/AEYFRQ11R4cyVCFgrESEdyrjsP7msk7y+L3pnsysjhsNBW3yoTPOeodY6VjgjIDAsfbHl0FerHxrNvaoilsux7JQTwqAs0FGoct9S7Ak/oBqjxm24PQa1tsXBwHIhwn0xE/3Y6L0LsTxrtZxZhqcZtG0hIiZaSPQyRHm2D1XoLX/AA43cWyK42PcNHXxPEsvCYeCQMZIDglSB+mhte9pX+0UNJcaq3GKlrFJilJ7EBiv6d1Pr9vqNZT+Dvr71cvPXvbO3Kvet9p9v1grIKi3W9w0cg+UmKt4T5R2DhWyRny69U9pPabwY6V90m8T0lOUngkpoo+SnynxFUY9R3A7Z1yBotdk4K9G7trjDVkcROkQjSm8VyPVQSdXPpj0vuG89wwU90pKqjtdOPmKqVoyhdR/ApI9Sff2Gdami23YrfGz22xUMciglVWJVBP0zjtqo2jqZT1O822ZfbBNZp5UaKIVPHjO/qACOxDDODnv6aiKLWEFxTCiGkSULviPO0b70Cr6ew2RKSOlr6OKhLRKh5GqWIsvvgjPr6g51izrl056k7G3Mu9bRYI7hY46WloZoqmENBNKI+bKkn8D+cYzgHW+viN2xsS39MGiqpbJYIFudDJ485WFVCzqzKp+pAPbVp6eWzZ26+n01sM1FfrbXO61KOBLG2VA4kH24gaUHvgD0RX03OYQwwcLxd633vYN/wBlRV1jtnyF4lq+FZRSJwlpiFHYr9M+hGt7/AvYtozfC/smgWKOuLirralZ44/FgqJJHV1QqoPDBOAxJwSM47a58QPwMWC1LV7y2fZEvFBCDIaJoBNV0SjueAP/AHiIf3D5gPQnQk6Y72unR02y4NVwfsNahhNRxDikUYP/AIa4BGe+VPcatQIglZbeIuo1+5uG6TyPI+nmtmVOx7HWV9rulbUz1tNb4uVJA7jwWL+Z5WGPM7EnJPt21h74m9iV983vVbb2fLTUcdFWT/7quRTQiQhgsasSEyTk47ZPbGjn0z65TdQNrvs+1XiCzbgp5ZzZKi4xN8tXUxdisTPjyOuQM4PoOxB1BXLpV1Ert6VV13rAlM91mBnjoQJ+QICkxn0zgdj9dczZ17ai0UQA2oDkHEnrneeS6LitvdVWN0gvAEtIEiN+W2d+h3WerL8GXX6uhSUWkcXKyLMJEBx9R9RpjcehW/umm+dsWrctpa5zXurYChp1Es8qKQG4KR+LDenp216QWvYdnsewH2xQbk3DEE4yQT1suWp3AwBxUAcDnuv+R0Odr7ItFb1Ooqzf1RVWu92uFns11hYp4UobJkgkYFTyB4sjgqwJUjXQW1PvawY+AI659Nv30XN31enZU2PqUjnE4gHlJkc/h5qldPvhdsnUKzJc7B1DJjhcqYoqRIp6Vx2KMpIKsPfI9dWSn+Ay0R0iUVVvm6vFFULPGDDB5OK8Qp8uSvr2z6nQh+LCw/EJsTqZuPqv0/Wne1LaoFqa7bVYYkE6K3KaqpufJJCisWA5KAFPLWRan4lviA3PUx0ab8vNZNLlY4YXkZmJ+igknWzWbZMeJY0xt4QY2PMqFoL/AN+2fpJ6YPTp8sr01pvhD2XboGgunUO5RwM/Ngk8FPjvnAITKj8jqXPSvoTYoV+e6iBPDJI8XcGMk+vbmO+vKu61vxE19FPc7mu6BTU8ZmmlmiZURAMsTy9hrlN0w6/36OKr+XqhFOqujTV8MeVYZBxyyPXPpnT1eIUakF4B+Df0KtM4NxZ3hdUd12d89wvS6ay/CDYXM9VunbjSgly7V7Sty9z2Y99N6zqx8I9tbwob7aajw+440bynP5ldeYV46Y9Y6O5yWqpst6rpIlUlqPxaiLuM9nUcfz+mrhZvhT6mXqipq24XmnoBUxhzBMk7Sx5GeLDAAI9xnTt4synBDft+QCx63Aabi6lUuy0jfxhv/wBOW/ZPiq+F+zgqJIH4gYK2te/88ahZPjm+HWwVb3XbdzvdtrSfOtPDEIpf8S88fzzrHlL8Ft4cBrhvJPN28lGP/wBT6VuHwT3t44Rt3cCVMilvmGqk4IFx24+GGJOfrpn8aL8NaIPqR9TCqjgXDrQB7rwuI6VGl3/HK9Bfh6+PzZHWvfB6bta5YLvUpPPbqiBxJDPFEhdvG7AxMFHcjkvf1GiWqTbxqLtty5UUFPX3OX5KZqWfxVhoXAeeUPgYLJxjHvlvfB1iv4Tfhfrelu4Zt1X+13C61dbST2+Ke3Us7RQRyceTDKjkfKQe/ofTW2rdZtyVk1tqKO2PS/sXwIqZqmCSPkighmIHdiQT66yRU0P1Dflv/wDi6W3uGXgNOmSQAJJ5zyzBnqYjzVT358PFZaqJ6vZ9etRTJ/8A0k+FlUewRvR/yODoM1FJ8jM1O8Txyx9pFcYIP3Gtj0UN93PHHLfLfWWOShqGeJUljdKj1Cvjuy49cHHr76p/Ujola77t6orrYQt9p/EqFnCcfmf4jG4H9D7H7ar1LcVMtwVZqUsGFlmUNIDISMZ7HXxkMEalZApbv+ulFDKTFPGSCPUa+SRRzq3MFVUDiPfVKIMKqdl8ejlMZ8+XYdzplJGsUY/ehnU4AJ1IgSoUBl48h/MaSraCN5BMmCcfXUUhMKPibxgU8P19TjSY4RglQWZTgA6c83hQw8c5Pt7aV4hlCOoU+pOlCRJTVPFmly0JAUen219J4sZImZQfUDSvBl5O8o4jsMabyBz5w+FJ9NLZIHKH9Sg4lTxjB9vcHSDRFKdQ1YS3/L9NKJHLx8eqjII9ADp/TUFPMBNwJUjP30sHIUCko0gSmVvHx9SdKxQwsjFAMY7H66VWgRi5jiPYZw2lYoW8EymNR7Aj20oO6cKt74r77DsDcEe3aloa9aFpo0MSypK0J8RVZGBDd19/zGsW7luM+7bYu5q6FIamStc1CwqVRTKM5UZ7DkucffW7LlV2uy0vzNxlBVlLEY7FR+LJ9AMZ9dYWs1wt+5It0WizwyLTKZqigDsCTEjlo/14qPb31MA6dQ5Qf1+isWFyyo9zGmY3WsujFs25vPaVru1fd7dRVVZQxfva2jWePx+YjdWJ7oCQxLYIGO+tP9E33p0rfcNpo6a0RR3SCnno72aX/co/D5co2WIlOY5ji7BeQyDjHfz66QR7gvnSXc3+zlxqqe6bZZ6yBqdvMI2USj9CUkHpjvq59IPiV3Bte401T1FmvNpoHjc/te1weJzbieAemb91J3OCRgjOSDqQLy11I7AyIwc+Y+K7O3u7Sk5j3s1EtGqTIkHkDjkB85BleiPUPa21Upaff113YlfdKmmlhkmg8Kk5sJEB88JzxQhux8Qd/TvnWLOuG6qW+bokmjuD1EFv2VuOGkWSlSOaHmo4mUoDHLgEASIFzxB8pGhZ1K+OJ4qqstvTqz1UsTPk116VFy/fLpTxgJGD64GM+41SKPaXXPrDHa33WtTaJdw1DLaau5xNRQT0saCSVI1C8mUj08uGJAGfYgFTuiyoZE8/Tz/f2UuJ3tqxrXUW6jIyQG41AgQzkNp+2ILdTXbbuG2rHarfRW1Hp9oU1ARDKZGFXLOJHkc5wshDHsPRW79znSnz+4KGU1dHf7bW26FAs0EzeHPTIp7gY/FgH+WqP062VeaKEqkcgma51Ecy1KCNUq6QBmgznJLRAEZA7sB99EexfCjv7rLuKRunMyChkt6XGGrrjNFT1anB8DxlQosy5ZCGI7KD76jY2lK7ZW0wKjfF6iTMeY1NPoCq/aq4rGhY1aQ/luZpiMNILh8JLXHpkRAhEfp11T21siZb1NcZjZ7jRM0DSQuJsKQMsOOMF8qpXIJU9zjUXu/4o77cpp12xaaWlpUfAqapmcleByQvYKQ+CM5yo7gZ7VDqF0iuFuscmxaK81sV12/X/LVNElaswpfXmgRCVXuQcj1z99R2z/hrvt1KRVVUII2bm0ldIeOf72Dkk/cDSp0CG7rmrh1erimdI+ZUFfetW9b68Usd6PzMJRXko04eLIOwJXupPcjt276Z0dXuV4KdY6SeK7XeWaQoHUGRXY4YYA4M78s+wAdvRToz7j6OWzZgoaOhrZdwXasmEMs8VCWgt64y0so7FlQEMxYgd0HcsBojWjplc/21/tladmzPl1WiS4U4KJTRgJEqxr34uFEjk+Zy5XCpkNetW0adtWrvp6jOhnTUcknrpHwkhDu+zsvtjeVRDwajmnJ0Aw3GwL3THPS0nAIKzl1Z+HvrJa+l/wDtku2Lk219v0j1VxqayHw0qA+M1Kq+GYBiCCB2BBGrH8OH/ZFc6e6WPrTuS52qxWiGgqKcULYkqJ2pVBj9CcHJPlHqB3GiF8UVb8UW7tk1e27nFdbxa7xVw0cVNSosRkJUuwMQAJRSnd3IUeUZJOsdb+2nvLpvdrbat40EtlvEtvjPKKdX8RVZkGWUlGYceLDvgjHtqrbWbHtGjcH4k7krQu+KPvG1KFd+2gtHJobPhHlkfGTuStDdJbvS7T33dZ79tKTdNHU3CKtijo5y9RJ8u6vBEycCOAYAsScHGMd8g97ku3xM9a7ZJtizbJpNrWKrcu/zLu0hQDyoePcKPXHl79/bVU6X9N/iR6R7E2z1A2C1o3bZb3QRXKS2VFOGCvIgZsMuULYGM+IpyMcdFrZf9oP0zevn2l1T27cdmXq3E09VCYjLFG/ofKAHHqPRWGD666mjwq0taYLqfeHmC6Gz8N/mPRcbf8a45VuP+yqCkGxpcGlz46gGNJ89Lx5qtbL+BWqo6Klh35vSqmiUPwoKfKUy8h5gEGT3ye/LOjJtXoJsbZrl7JtinnlVVzL4I+nYEADP6k6GfUH+0M6W2KKddh2qtv8ANHkLWVrfJ06nGBx7GV//ALQNZk378cfXLfbT09ou72qlfCiK1RfLJgdhmVsyN+hX8taTL59uMaaY6NAB+mfmVxt12YvONn/ualSpnd7ob/tw34in8Vv++b12XseglqN0butVij8LPCRkgkbjnCog/F+i6z1vX42uk22vEayWau3DUZfwaivk+WgbPuUPJ2x7YQfnrDFdLum/VD198vMis5LSPzLSHv7yMSx/nr5YNj1+6Khk2lYLjfJOREktPETEh+rzviNf1bVGpxYNkUhvzP8Aj/K1bD+HVq80xeE1XN2aAY+R1GfMQZRa6jfGx1H3g0sVumS300wAMVDF4AAHoObcpDj7EaAu4d+bovDST3W8vGsmeRDnkfsXY5OrZuXov1Ypaukt1o27R1RqYjJJNR1SyRUxDY4STNhA3ofLy7aNnQvoFLYrUs952nbL3uQTvK1fHAaoQRnHFQ8o8NCvfzBe+fXWbWvqtdviJI9cfotbXwHs1cG3AbTqcw1uqoecQ2XE55kDqQszbZ6T9Rt/Yqdv7Yq5KR273CsIpqb8/FkwG/8ALk6J0fwhXiCxySVu8KX9rvw8CKGmYUq5YcuTviR/LnHBAM4762LbtkCOojl3BeeEjDBjpP30oH08VvKo/wAPbRn6dbS6f2SphqqjbpuE8iNJ4k0niPGq+pJI7n8sazRXD3aZn0/VWva+JXrYsrbumn8dY+L1bTZsf7nfBZd+Fj4X949PrnUXqyrWXS4XCm8BqmWnSCCFDnPh5DSdwcE5GQNb12NtDdtpip5LtdKSk4d5aagh4JJ6fiByM9sZ9cam7Zuzaojip6eaOj54CxsnAflkdtTkNwoaiXwIKyGSTGeCuCwH1x7achlWCeS0OHcLfZv76vWdUeREmAAN4AAwJJOZ9UvqrdRNh23fu3qi2VAWGtRGegrRkPTTgZRwR3xyAyPcffB1adc0Tda5ErGnTb4ldv3Lcdd0g69JDDu7bE/ytycAVNOHUgCQnHmXBHnxkZ8wHro7XzeM9v3Vtjb22qVp7NdYKmae40dI88MfFP3KKyDh5mznvkBfTv2wJ/aYbKG3uvlBvPZ80ttuV3skdbW1MJKZnifwgfoeUapkD+7k6rvQj4x96dPKGeGv3K4SmZfEjKK3jLgkkhvKSD74Bx76p1HGjh2xVqnbOuQTSGRyXqzaoBcbfBWmWT96gJEkTRnPofI3cdx76hLv0u2TURvVNs201c4kaYCSlQ+dvxN6ep99Z26Tf2jHS3fRWhu9XRrWoMSrTyGKVT94Zcf/AIudaS2t1T2FvGJZLFuSklcjJikbw5B/5Wx/TOj06zDsVWqUS0w9qqlb0p2deKcU1ZDY7cQwdPlqMQzRMPQq5wQRrtB0y21BTy0Fw31cLnDIO0dVMshiI/ijZQGQ/cHRSISRQSFYHuCRka4EReyoo/IDQrizoXYis0O9USnXq0SDTcRCCl422u36qklpNy1Fwo1BikWtf92yt2KO3ucemf56yF1n2dJtm51nUHZfUi8RzWl5JbfbJ5zVU7K7jNOQWJKMQBkdxgEHtr0knoqOpieCopIZY5Bh0eMEMPoQfXQB669D7VHQy742zayfkGSqrLfTRcjLGjAsYl/vYB8vv+ela2NC0BFMfUn7qN/XfftArgO6439eqz3edp7Ygp9/V257Pe7jcbZQmvvcElxVaF/EUdkQoHZiH4YPt9++gnZJOl1ouENw230mt1FUIAUmjQc0yPYnJ9O3662N1L3Jsbelmr7XsmkmrrjuGqip7kKegm8ZUUcwJgVyoyAMnQ3pvh73HVFfkNo3Dv7mnZf8xpiH1mmSZQqdjw+pUYbymXNbsA5zf/kgqi2y+RVuQ1giWBxhgQpyPftjRh2faOlV2o1FZe62CpVOTQhVj4gD7L6DSti+G/fEGCNtSKTgfvZUXH8zoj7X6Nb+2/DWm301ppJa+meklMsgc+G3qAQDjOuR4vwXil4zRQuHs82kD8l6ILfsNc2oFG0bTqjqS6fUvDz54QQ3htm10MjybZ3nWV0chPGDgowPpyXufzOoqksNZ8s80ySluIIBct31oKm+HzeDAAXey0yJlSpikcjHpgjGRqSpvh4fmDdN5Bo/Rkgo8ZP5k6Nw7s/xC2phla5c/wA3HP0U63E+ylrS7ijZU3O/q7tgP/FoQCsNPUI0dJUUcTRA5yYlJP64zov7F6hSbTklgpaVflWfzQ8AF/MfTV8ovh52nB5prrcph/iVcf01NU3RbYlOQTR1MpH9+oP+mNdDRs6lL8S4S6fa1ahdQZpHkpnbG+rDudAlHUeFUAeaCTsR+XsdWLUDa9jbVszF7faI42IwSWZs/wAzqdVVRQiLhVGAB7DWg2Y8Sq7L7pOonhpoJKipdUijUs7N6AD11Gbi3btzalBNctwXemooIFLO0sgXA/X0/XQF6w9aG3BYIqLaFWhobjAJ1q4nDLJCxIBBHrnB/IaZ9RrN1Fx0iShBdwsFZWmCSN08WR0UevHkcaj6Sonr4z4gCBV8pA0k9Sr045RFmKceQ9NLULo8aQojK394ay3O1mSs4jmvkNM0samSZ8gkd/bXYRCLKIzcQRkt6E6XqKZplVY+Sjl6k+umNZDPTyr4RDAHJ79tMmhPPCpyQH4/fv66Zy48TwGyQfQ+w/XTinZI3PzSZJBYHPbXZWgqFyx4cvTTBOeijqaKUEsSrqDhhnX2qpihDOpEfqMaVZYlZVSYBVPmGPXXavr6DEaHxO48uPT9dIpbIbGrhpJPDqXDE9kyNSNLU0xj5AE/kOw1JUHTzdF/UGk2rcaiX8SstMwA/U4GrtYugHVauiVF2ylIjepqZlX+gydSDXnYJBjjsEPBMfEaXuoA9CfXU5sva9w3huOi2/b1AluM6wxgjKrn1c/YAEn8tFu1/CZu2qXF3vFvpVPsiNIR/MjRa6R9DLH043It1kupuFx+TkWHkFURDKhmCj6hsZ++j06Li4atkVlBxIkKsdcfh7pLn0lm2Rs+1U9VDHSsgpqynRxJIfxyrKOMkUr+hZW9MDAAGvJybpLQ9K981dJd4rztutpuaR22up/mIKkHGEScYZR27c1P+I69pd5dVbvZeodq6eWbZ1TXfPU7z1dykYLT0ilT4RbvkqzgqWHpg4BOq/v7pF0/6+bfFh35Zrfb78EaSPwJ1lnpyDjxYmwGZM+oIwfcaM+nqDtOxwVaZTbTeXt3P5LyI+HvcldsDqNuKxUpQpcrfU0jIwyriJvEHb7x8/56IVouOzb5YbltAVdF80lPNQTRvxHhsAQjMD9CVbOqLv3aNd0f+IZaO5L57JdhT1ThcCWNHMMjYPs0RDf+bVO6sbIqIt03Kts9Q0Nyjl4OnIIs3HKHi/pywv4WwD7HPbVai6SPMfUIz3kAAdUG9zr/APF5n4KDIOWPVQSO4x9M516t/DXuqGfolstLJfqu/QC3xOJr5UrNXUzEYkhjn45SNGDIi/whVGTryrqKN4qx4b1BPFMrYkDoRIhz68TjWi+g3WEbHsH+z1M9TNb6eaR4ZyvkXmQxXHt5gSPfudWrhpNLG6fvcwV6gbG6BdD6Wuq98UOyqu43O73FrzM97qHnEVYV4s6RnCrkAexz20XBUTxwLTRNHTU6fhhp1CIv5AYGgb0O637Tu3SKTdd4v1LSUNkB+cqZX8sMeRxJxk/xAafXr4g7NHWvR7bstddVprjDQ1VW5FPSpG8ZczRyNkSqOy4HE5J+mmp6WsBSq1nEBr3YG2cD0WCPj12TTdDfiDo750wpW2zR7htUV2hFukaILVCR46nj3xgsqsV7jzntp502+MLqjU7aqdsbi2/aJqiWL5en3KtL8vU0bMygvIijwpTx5cWAXBIJzjRX+IfeG0epVPtmTqBLao77ZhVJ/usRYmOVlIjVH5MRlAcg/X69hx+xn3zTttyy26ns9LUI0MdTU4TwfLgNkglR79+320mOD4YOZ+Sz6t4W/wDjbqj69VoTp30mprjDadu04rKqgpbjNdLhWVdQzvURu0Zbkc4cysmB2IUZIIwM6UvG9rdZyLfHHE9bOCqw06Zdc9hg+g+2sCdHOvm7ekd+m6U7onkFurKpLdQ3GjpzW1NFGGJWGN3Kl0JYkKfNlgV5ZxrdfSe/fDzeHZLN1Borne4pONTT3ab5Svik91emnCSIfsV1Zey5pUKdpUI0tnI2cTu6RuSABPQALavqtK8unXbWFshogzIDW4GdhMkepPNDfcXTHq7bqea72K8Uu5Fnwz01SxirUXGOKlj4bnBwcYJ7dtB/b23dj0/VuLcfVC3zB47ZNZ5rLuCgWSmSCZlLMUdD35KGD9/fGtq786o7H2LN+y6iinr7jJEJIKOmCDxQfTDsQv8ALOsQfF71gv8A1l2/QbYs2x77su92G5pW0deiGqjkQqY3jnAVWVOLFsqJASuOPfIr2VWjw2pqpNGd8fn1XMcY4PX4g8XNKu9jxtklsdIOwPOIlagsvw/bNoEG5Ohm+Lnsdp/OosFb81aJSfaSilLRY+ylD9tZc+Jf4WOsFz3Lct+bh27Z90w1vA1NXt2mETDioQO9L/xFJABZk5DOTkaz/wBNPiS659J74aC/WO4RTQni1dbCUDkDOHT8DHHfBwftrTyfGHeOqGx5rJR2xKq9eLBMJKaUUNUqI+ZGaJiFlOP4V7sM4zjWu+9FRpLjPrv8x+fyVW1F9RqNpVqXP3mmW/HmJ6Qf7lkrevTPcW0rKnUS/bIvyWidFkFc9EWgPfiCGUcVTI48sAZH11C9L45erO5Knb1lrYbNFSU/jyVD0z1UrjkBwRFwvLvnzEAAe+tn7Dum+upWzK/bm70gpdprDJRfs2sooqMCBjyZufbEfrlR6k5xpK227pbtKEWez1UNXDGQopLNTCnp8e3KTA5ffA/XWW69AaXVStO7p8VfcspcKtO+LurtLW9NR3j0+aFCfD1sOW11Nrq1uN3uVdTvTrVVsxkkgZgRzigixEjD1GS2NG3aXSbc8lit9qqEWkpaKnjhV6wKCVRQoIp0AVT2z+Efnp5BdriYRTbco6SzRN2Y0yZmP5yHJ/y1a7lHQfs2ypQ3SvmqPlCbj4z+UzlvQY7+n5+2ueveNVpFO0Zk83cvgP1C7C3/AIYcYv2Nqdor/u2OwaVuNLQAJh7xk9N8lRb7R21YMGpj/blaBgCZv3SH/AvbH5k6XM9dOixOqxQL2WCMcUH5KO2n9JQ0qJ4s8qIW/DHH55D+YHp+p1btt9L9z7kdJ4Lc1FTE58ep8oI+w9ToNKjfXMGu8uPyHyC6Wy4Z2U7I0DS4dbMD+biJcfiZP1VS+SaUIzKCI+w7d9Evp9R3GrjrmpbbNO89H8tC2PIhLjkSfbtq+7c6QbftCpJc2a4zrg+ccYwfso9f11eIKeCmiENPCkUa9gqKAB+g1v2tsaOSuN4jeMunksGFSbZ03ZnhqbtXNG0WCI6Y4wR/zf8ATV1gpoqdQsa98AFmOWP5n1Oldc1cawN2Wbuua6ySRwxtLK4VEBZmPoBr6zKil3YKqjJJOAB9dBDrx1zp9lWqaksdJNc7maaWppqOnXLyKikmZs+kakZGfxEduw7u5waMpIa/GTR7b6jbKrbdU3m10tTaXkrqVZApnaQLgx8vVQVyMfUjOvJmoCQR3SmJJeF+DZ9iB7aJu/8A4jL7vZ7nVUkVW6ZBqH9MmTJ5H7nue+gxHdfmY655lIkq2EgBGs65DnUiT1C6DsxU0cQBJjBU/wBLLd47XL5sHgXBUMMhgR6j+Witad9X3Z9XFbrRequnWQHgoOU9PvnHpoBWu53OksddFbq6WGeGqSQJG+GaNsggfYHB/nphJWblqjzkmqnYZwWkY/8Av01ClS72S7EKnxKtVZWLNwdueJK2/tf4yOq2x8NR7j5RgY8OWVjHj/CSQNFnav8AantQPDR74s9HIp7NVU68yPqSqsPbPprzAkpr7OCriQr7hmJGkBZbo55FcH37Y1Zp0u7zqWY5zn4DYXtTs/8AtJegu5apaGpv9uoZGOA9VVmmT9fEUAfz0R6D4xOhlyCrFuimlWQAhoKmCdWBHb8EhJ/lrwSjslarHI9fr76fUtunpHEnhoCO/IgAg6MaundEZbPfEL9BFo649HavjLQbjpad5/71LJGXP58cH+ep+Hqd0+nbw13ja1YfwyVAQ/ybGvz+W3qbX2QOYHqpmh7s8c7qFI++cDSN16ydR56lZafeN2t4WPkIYq2TCk9wO59ceuhsrve7TpVm5shQEtfPwhfoWj3ts2b/AIW67O3t2rY/+unUe4dvzd4b7b5P8NVGf9deFnSnqx1Pue56Hba75vcqVZU4NSWYoE5ELn3PEj9dJ3frp11azS7mffFxo7eySfLlTGojJYhY17ZYjOO+T21IVnFxaRsqbmgNa4GZ+nr/AIXuw19sQPmvNACv/wC5Tt/XTSbem0YO0u5LaPU/94U+n5a8HrH1h6qVHS+s3BVb7vFPcZ9wpSU9VGy854/l+UqEEYKqShyO4J0v0r6vb7unUG22+/8AUG7VNDPJJCxmrCsQZo2VCy9hgMVOn7x8EwoEgbr3Br+sPS+1yiCt3pbY5GGQviEk/wBNUvdPxd9D9pxeNXbnEq5wGiClfTPdiwx2P568VOoO6LmKCLYP7A3Qu7IWFLcJaqrmlLspOPBiAz585JyQRjGjNsbo11N2t0pstvqdkpckqaye+3VaiWNhCzKscULDlyOETLAe7Y9tEZLnhr3AAoVap3TC5ok+S3fun+0g6TW+lqJtsRvdjTRGaT5ZXnYJnAbioAxntnONCvf/AMbfX3dVsFV0p2GslLUBCHacF4wR5hwjwS32LjWfdqdKBtW9T7n6h2O4xy19I8tLFa4kRMjzIhjYnKBgMrnQ8vW/92dP75PdNs7nqVF/maWog+XMaUsvbkGj/CQ3fzAA51c9m72m59AEx9vT9wqTbyoDNQR5bE/vorxvWwfEv1Xsl9vG7q+tmhoAKw0FVMKciEE5EcX4WI9wSSR9dEv4N94zbm6a3/Z13nlqaralRFWUfiNy/wBxmPB0H2WQAge3LWUbr1n3jeHqKe47zq3+YDIYTWHgyn1XBA7aJHwY70isPWq12moqQtFuuOWx1AJwD4w/dn8xIqY/PWA8upv0kQuuc2lf8MFcuGpuIAiB0PI+q2FUzUnyjpHCI0LYII76ZwtURyLFS0yuB75x218rqmpgeSl8FQyStGVb8QKkgj+Y078OpWljkeTj3HFV9f10xxhckZ2SctbM6vRzMsPI5BX2GvsbxSK0fEyuO2R7jSJp/l6lqgASLIfNzPp+Wukf7z97FK64YhgowNLZNM4CcwcpVaPwuLDICtprPWYh4NC0jqcKsQ76emr+UnREhyoTzFz3P31DV1TLBVo9CpbkclPZvtpkgu8MuKgmFQrADkrd8fbSgjWZhJ2di2MKOw19ghV5XkmpTCWXm3H6/npIFo25xTpGq9yhbOdMUt8o4V3xc7YgdobHtKqcjsHl4Rr/AJk6rN0+LXd087wWi1W+EccgsWcj+WNZ+MtvjkUVVQvNvUg98/YaWzSJEpgqyGyfbGdFNZ55qTqr+ZRLr/iA6o30OH3A9H3wVp41TH6nJ0t056xXvaO+Yd07pv1ZW0kKNFMrSNLzgdl8QcR7gAOMfxRgfxaHVEtHDFI8kzAP+MnvpQ222BlnhqmKt3JHb+WotcWkGUm1C1wJW3r10not/Xgb4tnVvelJQXWKCdKW03SNKKSMIODR+QkBl7+Vu+SfXVvsOx9qbYqDcaCgD3B4vCkrahzLUSjt+J2JPfA9Max30q+IOs6Scdv/ACtVc9rO/M0pI8agdjlmpmJAZGJLGFsYOShyeJ0nZep1p3tbf2nsusS7x+jCI8Gib+7IrYaNvswB1ep1WPHhWiCHDUFmv4zfhWHUjqFbd4bUPGtvEpguUTgBFHgYEwPt3iAP3IOq1sn4UXv/AFO3vsjqNaHqdvXOz2qutN1hRVCVyxhKqJDjJJJZu+fw6PHUbpj8QO/7zbbntXqjbtn0tDyPy62/5oys3qXZvXt6AYA7+upza3w2SVf7MuHVjfd13hdbTVrWUsgIo6eJ1YMuIo8ZwR6knt20BlJweTHhn7okjTndYc62/wBnRuna9LUV+0qpdy2WAF0p5UK1NMv/ACsMsn6ckPuuhF0G6M7Pe9T2jdVyutq4NIldRzlYzNEvdWidlMRI9xjPrjXtWtsiBLPj650P6qo6K1O5Ku8I1C9225LHFXVVFESaZpeyrKyDvn9casadOJwqV1RfXZpY4tPkvPbZe3n2zUXHZnRbZd/3fLeJx/3gCnpEK91LTyAEkf3lQ/bRP258IXxN9Tata7qRvCk2jbJcc7faC0czLjHGSobMrYGB5RH6e2t92y3Wiii8a1UVNCtR+8LxRgGTPfJPqf109AA9BqYpt5iVChZtothxLj55WctifAr0a2nHG11pJ7xMuC3NjGjn35EEyN+ZfV4390VtFZsmXbnT+yWuzuACscNOsYkwc8WYDJz9SdFU59hrmRnGpOaHCFcAAWTZ+nHTG9bWj2T1X2RX7a3PDTSU8F6+W8SNzk+G/KIlZV7jyuPTIyNZh3O/VKxb0pttbqrNt78tlsTwVqJZYKlWgI8hp5J4pmjYD1jK9sYyNepNW0ATjNAJe4wpUEEk4Hr21F3Db+2K2NUr9r2+rV3I4yUUb+mct3H2/wAtAFu1r9bQJ8xg/Ij5ggreodor6jQ9mNQmmNgSDH9uoOAHlELzGuPTq2325HcdBt68UVNRKGdaFIop1IKvxEqRoAvJVPFEyQMaJewJ62fZNyG+q43WntbUcNtqK9UasGQ/jCXh6+YpgEZGtx0ey9i08xqKbZVngkTsrrQRhvfsPLkemdIXrpzsnc8LUtftmjXK48SOERsO/sVwfvpnUHfhgeQED55PzJVO94m++AFXJGJMT9AB9F53dX6O1bo2bJaLbEYpFqoqhSsXAEKSDn39DqqdCNiRWnqbtu4VUSPHHXorhlBBDKV75/xa2R1C+ECWsBl2ZfuPJ8tBVJny4JIDj9PUaBlw6S9S+ne4aKoqbY5FNVRS+TBDKrgnH17aiSaQhwwqLHvA0tWn6zaFi/2OvNDRWukgWrttTE3hRAesbf8AvGss2naywKhWInsDnHrrWe0rq+4KL5ampJTK4ZPDKd+4x3z7aXsXQKGWVazdtzadv/kQAKoH0yB2H2A1CnSDxgI9K5qW8hphAKxWitrJlpqSinqJmACxxLyJP19NFvavQncNyCVN/nW3QEA+GRylx+XoP10cLJtuxbdgFNZrZBSqBglF8x/M+p1J6I2ypAyQrtTjl49ujWYVX25032ntrjLR21ZqgDvPP53z9s9h+mrRgD01zXNWgA3AWS97nmXGVzXNJVNXS0cZmq6iOFB/E7AD+uqNu/rRsvaVFLWVV1pRFEvJpppliiUfdm0xcG7qKv2oq77nstlDCsrE8RV5GNTkgfU+yj7nWJt2/wBo70+uO9bdsjZVbVbhqLrXwW5TQhoqSJ5H4hml7FwucnjnOPbWW3+ITqF8Sdc+3Nx7rnsFFVVTrDSWUjjEijIeQMecqZ/EfXvnHbQ+8kwEG4uKdrTNaqfCN4En5Beim9eu1NdNvx3nalRQXK2T101vSeGpEkCVEWOYcL+IjPYHAz7EapEO07dvajqr3XTSy3OdZIJ5zIfEaN0wUJHopBPYdtYb6TdW9/fCfu66bN3DT0tftDcs0UknjUxljhZJuLVMCHsJkHNSp9e2M+U63ptEOs8F4slzo7pt+6wiqoq+mP7qqiJ7MuPQgdmU91IxobmOcA8qTK1Kr4qR1NOx/wAHPrzCy/fvga21aUvEmyrlXUQuUaq9DcX8aDkmePCUDkvr/ED+esx70+Gzc2zxUVO6gbPEpC+I5DQMB/Esg7YP316kb33ltratMtRcpJZZHCt8vAgeUIWC8yufwgkAn76jxBYd02+eW3PT1tKZHp6iJkDrzU4ZHjYYyPuNCLiMlWWATheR0207VZZaS4JeKepiVgtTwPJjAfWUAeoXsfyOrHUT9OaUtEt1mmeP1EVMTkfrjW599/Cv0v3FVpdrfZ22/c4ARHPbVHgMD6rJTnyspHYgY7HWQesHwX9WNs3GtunTikG4rQ55JBQvyqoR/c8JvMwHtjJx21AOL6uk7Rv+R/JWXVKndAdEMLnv3YNDnwLdcqgnOCVRB2/M6r83Ue1zxs9Jt8oBkAyz5/yGqVXWq9JJJTzW6sWSNmR0aFgUcHDAj8wRqT2x0139uqtho7HtqtqGlZVU8OCZLBRljgDLMFH1JA9SNHd3DB4j9UPu7p4mDHWFIHeU9QWxR00KgZJ7sdRcNyqr7chSSS8acd2CLhmH0GPUnRWtnQfZ9go/nd/bvavnZOXyVmIEUIaPkHadh5yEZZgiqeSw1CeV0xpePqJsfZEEsdgsVroq135JFSQiU07+PBUqpmfkziKeKUIScmKQKe2RqAqscD3bZSpy2oHPOFQLhbv2ZIgvjRw1AAaktCN5l+jygeg9+/c/lquy22VZGqqlmLyPyZ857/loibxq9s7winmpaQ0lyWFpKCSOPFRJMZZ5TCVyDI8jzIoJ7IkeBkgAjCjvFwjeWGYNPIAR4b+oYH3+n3Gh0adQeOc/L5LYoXFk6WV25PPf78/RW/bW9K3Z17tV4ss0b1VnqkqqaeRSOLIwYD/CSDkH66JFj2P096+b1m/Ye8LnY5K+d6yosM1IjeA7sWkFPJy4tHyJxkZUEDvjQisuy967lOLbte7V8krZVaWhlmx9hxU6Ju1PhQ+KCsrKS9bW6Rbwo54JBJDWPSNS+Gw7hg0nHGrFVz3D+XAKxn0benIpzujV1G+H+xUu0f2HbLitvW10aw2qnqa2OCJ5nkDSO7vjnI+Mk/YAYA0C7p8P++LTC9wrqVqC3UsTTT1zzxtFIvsI2VsMx9ANGSL4XfiEr5hdup9q2ZTsC7GXcm6aKNeTD1KGU4x9AO2n+z+i1p3BsUbhu3XPZuza+y3yqsFUzM9RbqlFQFJabwwQx++ACO+RqPe1GCAQBz6/P/CFQJY/3A8dDM/QifRCam6j9a7bZ+RvdXS2injWOFqk8ikQGAvi45ensDqqD4id22aqZqAwVMqn/jSmTiT/AIc603V/DF0TvEcA3z8Wl73CkOFjp7HYmkjUj+6Cx/njVY310h+C3pJbVvFx2p1o3rGBydg6WuBR9Xdoew7j3z31ZNVjWgPAA2Qe5dc1XVHCSZP57dEO7f8AHP1gjmFVOtukq4KeWCjkKMUj8QcWyrcgwx+WhvW/EP1crb/T3qpv0MlTRVKVUMBoYPAEqZ4/u+Pf19z3066tb36Jbko6W39IuiM2zUppi89fWbhmuNTUqRgIVZVRRnvkAnTvavUqXbOxqOO3bO2xWz/PyRVNTX2xJ6jLIBH529FGMjt2bOnnSwsbsdwoVKFKqw03tBaQQQc77onWnotb+os9f1D3TU1N1mnnWsrv2VEKKIQ1VICskCMvLxqeqPGWErhkRip7g6uVk+FHcMwt27emS3yh3JYKilramz18ZYMYfD8aSknCjkySpM/huB5AArOwIOZLvvvqbtjfVLT7rv8AXvU2WeJvCM/l4FVKnt6+TjgnuAFHtrdlj3Tvq1bdsG+aTfdZ8vNSpWUsMlUwjqJgOByPQugUjH09O+dUKjXW7RGRH0RmaWU20BhgAAHKBiPki1WVKXGrnvlwhiSqr3M8oRT4Ydu54/QE99fC8cEhwWlTkDhf4dIUO6LPuGz0W46WRKhq3ktXEgA8CoH41IHYA5yD6YP20rUV9O9P+7QhUPmVfUj76C1wIkrOqgteZTk1UNwZTRxK6k4LH2Ou9ZF4NL5E7tg+mAdR9DBDQwPWrUzFMjIA9D9NJyGrrZlliqpTDjJUn20xiVCSuvjzyss9Wyr6qCB3H2xrpBZqiWcS00jcR3HI4OdORSRRwSuVLyRkEDl3/lr69Y00QeoEtKMd8rgk6lA5pjKZSVFYsMsFUOMhbiEz6/rpm9EKIKvybyNIcgL7fUnT5pKVVIWTxSGzyPcjXaEyLG86JIST5A7euPXUSByTx0Q/rLNFJULUTIxVOw+x0pTQxO702Ufj3Dt2IGncFTSRBS/OTPfw2HcffTC51MdbMtJSoMMfMQcD9TpjuowpaOnWCnDSOnhgdz7a+pLT1Cg0kjPHJnt6AabwwVZpUpFjRu4XOc5GprZOwtxdTGlbZ8lFPR0cng1EizZVX/u8RlvyOMH21JrS7YKQaXGGoWdZNyXbZuzHrbBRpXSVdQtE6ytgxiUMoZfYnlxxnt30AOlvxX9Suml8arqquolAYIamil+XqVQHupPcMMj8LAjWmPih6d782dtNrLftpyJaLjwX5/gwAkR1deJ/gbKjuR6axjuKyw1OIBDFFUsx8CdV4kt68ZMfi5f3j3B1Yo06ZkP3Vyg80fCea9UPh++OW9b+s1Jca3bUt+oKhnjWeKFaarEidnTiCY3Kn28pIwdaZ2t146W7oY09PuSG3VaY50tyHy0qk+3n8pP5E68EKcb3j26lm2neroltFdHVtBTM0TLWEAAsFOckx5AJ/gz66e2frv1ko6qgt1bf6u7RI7LEtRh5HLnJzIe5OfTkTj0GiN7we4ZHmrMjmF+hC8V9RJt6urNv0kV2qRTSGmp0nVVnfieKc+4AJ99Zm6WWfrE24qpLv0KlsMlYSZ7nLcoBCMDyrwVizgEZz39fTXm3sf44bvsyeKFzWVcUqF+UNRJTvTyZ7KeBHIeuf01onpv/AGh2+7taP2lBUXJCZDGIp5kqFQqe4xICcYIx5tQe8zqqAhIQvS3ZtDuO3WRKbdFdTVNYHYg06YREJ8qZP4sfXA1Oa8/Iv7TCt289LR7ttdmWSpVmR6hXpuQBwTyVmX3Ge2ilt/8AtBemF3oWqpL/ALWEqhWMAuciMQR7ExkEg9sZ0ZlxTIwmIWsdfO4BPvrNk3xubK4OKO20dVKgV2EN4iZeGMk54g5x7ex9dPIvjY6SyqWqKG7KCQPI0L5P2xIM6l37DzSgo9Ckp5asV8lOwmQAIxY/l+Edtcqjcg7eAylT+BePv9zj00IKf4uuk1SheL9rEBuAxBGckAE/+J9wO/vpRPiz6R1EngJJdnLD0+UX9e3POpiuzqod305ouQRV0YVZalSuPMfUkn1Pp9fTTtQc95S2Ox9NBR/iu6XoywwW67yFiFAMEKD7fikHbTC4/F3sm2OyzbdrYyD38Sqp17/fDHSNZh5qQYQj36tn6dtRt323Y78qrd7dFUhTkcvUfy1nuv8Ajk6fUrsqQUcajBzPcACf0VD7j66iJ/7QLpelKOV4tlNUsSMHxJkX8yOP9M6E65pDco7LWvV9xhPoCtQWyx2izKVtlBFT8hglR3P66faxNdv7R7Y1JA3gXE1EwY+WkoWK4+uWJ0JN1f2lW5C0k9pjuDRKTiEQRRKw9stnkP00J3ELdmJWjS7P8UrZZbvj+0j7r0zZlQcnYKPqTjTCt3BY7dGZa67UkKr3JeVRryJr/wC0p6r7wqmtlqtdJaZRO0CvLIZi2YmMfb+8XUjHp3Ghzf8Arj1U34hkvG/K6SGUd44X4IPsMemlVuzTAcGmCg23DXXFR1Jz2sLf6jHyXrlvr4mumex1lWouQqZYmMbcXWONHHs7t+H7djn21mbqR/aldNdvVzW6ytU1ro4jkWhh5iPvhiZHwPL69gc47ayFU7gs1k6bbKh3gk11tlxvV4r69pap/E+ZWOJIXD98lBnCnIPI/nrNlVRVO+96zUW3qFnnvVd8vRU692Z5n4ov82Gf10Sk91VocThUq9M0ajqcyQYwtrdXPjo6qyb9u+zlnt9qp7c8sC1ZDVUkvbKuozhSQykZHbOgn1Q35u7e3RO3ble61V5ntd6rrdeKqUl3p46gRSQM391DxZQfQEgds6hN6W6i3Fv7cV0tcyVFMtWaVaxSGEghRYcp7EYjzn7+vbV56NWiTb9fcN0VG5ZNvbbtVMJL3VcVcTRZ8kHFgRJI57KME9+2sy94nb8Op97UnEY3JPQDqTgBaVn2evbyi64wGNElxw0n+kcyRzMQDiSq18KnRi/7yub76jK0FvtEFQaevqcxxfOSIYldWPqIVZpCR25iNfUnGodr7X6abGgFJsKKirKiFEXx6SnjjLY8oXOecnf1JOT31mDqx8RVdvm5C0tQ1dHtCmbNPZ4J/DM3H8DVLj8bZ78R5V9AM99Rm8Ote7LTFHR2GkoaJ6un8R525TSseWTgnAUH6Afrqq20v+JVm3Fdxps5MET6vOc+QwOpVTUy0Y7QNTuv5D9Vs29st2SCiqrZBPBKpFRC8Kuvc9vKwOMDOmln6i1XwwbgtVA0U1y6W7scyz2yBuU1mrcASNBn8LYw3D0Zcj1AOvOy0dWuoG39xm+WzdlziqZZOcoeYujn6Mh8pHt6aJFd1i3f1Cipob1cEdYZhMEjjCKGAIHb8if567HhlnSty5lw+GEZEEz0I/WVlXVavchpaJcNs7eS9Ft73ix27qbsrqXVT2St2TdbbNRUV/llKH5mRwIogucEtkgowyrLnXy09RbfS9Tr7tvbkttpoxbpKyrt/HFSKjmP96T1WaIqT3U9iMEazR8OXUCvq6qt6abnp6O7bQvMD1dXQXFS8dPPCA6VUJBzFKpUeYeuO+jhsTZOytq1dxpNpyVlwuFSJZjNM5klhjml8RkVseSMt5gNZl62nbvLabpbyVqgKhbLxBRcqtxWyN/l4KtK8s8IXkwSThISA2QOLDsTn8xqn7tv9sjtk1zohKGEEzRrwKvIRGxUKB+LJxjGq1d7xtjazsK+sgkmLrU/KW4hpPGUkASy44r2JOByI+2hNvTelzk2rXS2O1z0VptsEssiULeFkJljymbLMfwnA91Xt21nF0nCs64EoE2TaO4rNLPX9S9x0Mbozt+zbfSU01QmXIzLUEFFPZiAMkkxD0lB1Xt99dKG2UctrtaRPC2UNPTswibJPIFshnUqzLkkZUQHAeLuJd09Vrxu51oxHHbaFCVjgi7BU9gSPXAwPyAHoABS6+ojlkEURyieh/vH3Oi0uH02VNWgA+QRtT30y+o8mNpP5Ii2LdVNuq70l039UVtTaEr4/wBo0dFUCnlmpi3KQJJghWYs5zxwGZjjudXjqNv/AOEKexVls6UfD/uOhuk0Zihud53VNUeA2f8AiCJezN9j21n9J5OAjLHy4xjXeMrkKc4JznV4Uw30VKCTlHWk6q2NOldLPc+me2dx322olpjuFwikWehiQM0csYjZVdstkl+Xcfpob7s6g3zeFwtm5LrR2aNqILTlKOhip3qMEs0k4QAyu+Tydu59NNbP/vNlutA34JYlf19GB7ary0yc543lVfBBKjP4vsNPobuk0HktWV3xMdXlhtNjt/xIVu3bdLBBDR0FNRurQwhQqeJKuE49vXJ7Dvqj1HxB7psd5qYr9vq+73/3jw5luszNTSorecRsHyA2OzL3we2qBTXewU8e07ruK0C6UdOfDqqSOcxtJDG4JTkPwlhkZ9tPevu7ulG9OoNVeujewajaG2pIYUgtk1UZ3WQIA78snHJsnGTj/LJfSL63cPaSwjfEb9d/3jnGfeURcvNB7Sabhnf7/wD55eU1vjZm77jQy9Ra+OCSxTZrwnjBTFTu4AZY8khByUd+/wCervffE6Y37pn0unt8S265Q015rRIuXYXFsLgnsMR8RoIXSjvNLSRWxzU0wrKeMiGVmjWRGwytg9ip9R+WdHv4p78m9afpD1Ps9LwMW2qCw3Iqc+BcaFuLI2PQlSrD6jvoJt3VrZ9Gq4EEGIxAjE9T5q32W7+1LXveHQfDAjGIBkmTG559AvTHpj8NF7qbFD+2qlqZ6fNOXkqncymNihbgpAUdgR9c6nt4fCRQ7z2xcNr1V7iWkrYpKedZafmSCMAr5vv76GvTv4xt11W3rg9fa7VDDHWRR0ckcrmV2bAkDg9hgg4x6576U6m/FRvak2/cZdtXuOz1XzQCTinSZjGoPJQr9gT282O3tpWDm3XCadS4mTTGrrOnP1WlVqOtr5zGEAh5Hlv9l43bo2tV7Z3DcdvVDDxrZXVVvkJb1eCVo2P68c6k9oW/9sUN0sDyFTJTtVR+bHF4ldgf6ae32j3R1K3rXPRWmapqpqqrqqmSFMsxMjyyyv7fxE/y1Fra71PcKuz2i1V0tdIpiSlpoXkmKgeyJkny9zj21pW9c1GNBPigEqnWpuLS5ghskA7ieX5GFK1e29gydCqHfK7lll3zPumW3VNuecMTbvlFkSbgfMMSAryzg5x7a9Evgi6XDr30W2/Yb1VvT0FnkqZJZVUM3LmpVAD/AI2OvO3qLsiew0Njnj2BeNttFb44bibmXSSrqSzHx1jdVKIRgADI7fXXpn/Z4blHSL4dqK+3Wl8WHcFVPVJJ7xxCQxrn3wTGT+mp3B8LQeufv/hBNbuCHbzPnuFdN69IdjdC79Ltfbi1L01akdcGqZeZBYsCvYAAAqcfnqsSz00FTM1QIhGX4hlPoMe41YOovVBd8bpqbjPSFBURpT0wCYPhj0P6knUFHCiI0oMYlbyvG69s/XVZ+gu8Oyo1PE4kJVfmKiMxUpj4OMKSOwH1xpOQVMLqKYkKgxgjHp9tI1FbPFUx1Am4CI4JjGc/lpSmR6+Rp5Jp/JnPH1c6iTJQx0K+TTUtQxqImkaRRyZEbGW0wFdUqpluMMz+G2AvEnOdO6X5Q1U0a00kkkX4GPl7acTXExMaUoDlcjC5Kj7nS5pRKj6CmqKyoIq5PlYc8lUAAnTmZPBKo8bskmfDXSNS000glZXHNVw49O3qdd8VVVcVSBvFgiX94zn+g1FITsqNRXtJ5nee3t4iLjvGe2kZSAi11LSTRHJI5KOLn8tfV3FW3CLFBTMh95JI8Ky6ZXKjuddHHPNcmiVWwCvp+g0jhKeal6eouVRTeDJLFTSyxsq9+5JBHtrNHwl/FPuf4cuuHzV+q6irstfWy268008rEIjSFfEGfQo2D9MDWh57bBmkaollYjAZlbsT9dZA+J/p3UbO3u24KalZbZf8zJIB5RUAYkXP37N/PRbd+h/qrFq+HQV6m/E7LvPq1tf9nSJBQ7dHh1cbGRQHBGVcsTgjBGvOrqFtLaNjpq1Ki+xzVEKsIxTMG5SD07/nqfTrVuPdnSXaFu3FuyqFLR2pKJKcHBZYmZO59D6e+dQvT7rRsvpv1IsIvm0aO6WpfDnrZqmNZGKyt3PcE5VR2I9PYeurLXNqGAIKtGA7CoVvsO5K+hFfQ0lZNRXGmaOq5wOogmVPI3IDupdVz9mOov8A2KEtNO91+cpJS58ExorwxD2Dj8R/T0++veza22+lG49q0d429Z7NW2e50yTQzRxIySxsuQe3bWYus/wjWTcm9DW9P7BBQUE4BmhiU+Hzz3IB7DP0GpspvpYaZlSq+OMQvISbp5WVFSaR3jp6oh2BzmOTGSCD9GHoR9dTHRi+zUc1ZaZpOxZZ0UnOO3Fv/wBOtTfFP8LV26MVFs3HNGDbagsKaVBjgwGWiYfQNhh9i2sY1FXNtXcc1bbVjKBmiZTnyMTkhh7exH109VoqNLUmE+6jH1+t4qto2q9R/jo6kI5/5JF/6qNAPnkHj6+2rtuLqredw2FrLLDFDT8VDqo7sQfXJ76p9KkAk5y5ZeDMuEBBbHbIyOx98aDbBzGaXiFKrTFICHAz0nHzASHzdREA6Tuv3ViD/TSy3u8RnEd1rFA7jjUOO/19dJ+A7j0/I6WpbTVVbfuIGcf3j2A/PViAgmoG7pRN0bnQt4W4rmhPc4qnGf66kKLd+8pGVY9yXaRlJP8A3uQ9/qe/9dKUu1lBDTs0jZ/Cgwv6n31OU1ikdFiWMIg/hUYH/rpGDyUTUJ2TFL1uipJNXuS5OxGCBVuTj886vfThqqqe6UU9VUS+Pb5SpllZsMqlhjJ+2oyh2sTxLRkH8tXnZFino7vTvFE5Bbw3Kg+VX8nfHoDy1VuCHU3NA5I9lVNC6p1ejgfkVBeCzdyM/fXFp8AgAZ0/MBiJRgQUPEgj3HY/5aQrKqjt8LTVbsoxkBIy8jfYKP8AXA++uEY6pUOluSvsSrStbekK9UgNSYgAGT9cEH6fXTLcclFaKBpLtUin5jMcOOU0n04oO+PucD766wbnq6yz36eC1y2dqChNRS1kzrI5YEDGB5UJ+2T39dCuS61dQkk9c/jSVA5B8+YtnuW+uQf6a27PhTnEPrHHQFeUdov4gUqeu14a0hw/E9p+g+xPyU/ZbZUXaGurLTDIrNJFxd34+G3MlSW/hwATn7amoblcq+6JCDb6WdUMtdV/MeAjSAlXHHJBYEfwjzeuBnUNaNy3fbO2JIIflRHWXSmrHUpynlEIPFBnICZbuPf09MjV8q+t/TzccLvv7pFbK+8U64o7taZv2PO30SojiR4pFHseIP5a6JlQtaWBsjkV5NdWuuoLm5MExLZyZ57fPp5Ij3nbFoo+m9Dszqrv+1UtJeHF823c6UtLNA7ZjkWWEDLxOAMsp7Ed+4xqnbZo9qdOYaq57I3U25tzVcEtJS3OGjeno7THICkk8fieeSfgWVWwFTkcZJBAmpZdwbtroLhuG5SvFGng00csxwIkzhQSfLEg9/T6DJ0T7VPFDCtqtMIl4cckgKzt7Mfp9l9vz0e5a2xoaqvvu2b5dT5dOu+2+fY2VTjF57Pbu002nxuP4R0HVx/fOJiyUISipLZbIzDHHxiROPmf2H6k6dXOeo35dqfp7YZSNvbbkae4Swny1lyPZpCfdY/+Gn3DHUJfL3V2a3iGmHh3asLU9N/9IlTykx9VGSPvjUpsKstW0RBt6e4zwPVy8JI4/Qv2CkuPX1IP3J1zVta+03PtNYSGbD/UefwGB5k9F3PaPjFtop8NtJFJgE+cYACVvfSCG4UMkFPG0MjDikgH4T7dtPt//Dxv/ph03251V3y1urbDU1qUjQpkOwkDGMsc5CniR29yO+rdurqf0y6PTj9u1cd4u8J5/sqjnE0vL28RhlIu/wDeOftrMvVvr3uzqrXVKTRrabNK4MdsglZ0UDuAzN3Y579gB9tdPSDHglxjGPVcPWq6iBTGOav196X7V3vm/wDSi3yZdWaeyfMiSVCBg+EXPIgnuASfz9tD+x3Oh29c5LZuBKu2VVO/CWGpgKsn+IeoP6aqu2943Xb1bFWUszhoWDKQxBX8iO41oyS4Xf4jNjw2m3bYte5b8lTT0qVq+HHdbcrOORJdkEikAgF24DJOcgac16wgPzHNCDAPE1EPotbI6+ee522rU09Raq2JaqFshSY8ZDemRrR1f073Jc47bu+79WhBbq220cDyfLKhHhJwxIsYAkbHZVwWYnJ9c6wTQbyvvwd9Vad9idQYt1UAblcKMQmmVuMhWSCWPnIscwAI5qzAcuxYHuaLx8QG6+ostq6mbdvT/Ixvxjo/ECvbqlMZjKJjj2/C49R9NUroGqQSFI1DTy1aCu+2ts226iaHam4Bbo41QS3UAvM4/FKYVAMan2U5xqD6oC2S9PK+ntPhtDVxNTBY/QcyFx29PXUVtL4wLnU06W3f1vp7jHjDTTxHmo+odO/8wdQvVPrdsOtoTDtayPLPUxiQSo//AAXB7EqQMkEe+g6NJwmD2u3OV5xXWkehuVVQyDzU88kLA/VWI/00wICtgH76K26Nhvc6+pucYaOapkaV+2QWJyTqpHY1xgdvFHdR2wPXWiKghNqkqvx+Ygg98aVTsw9ygyRpasoJ7dIDNFjHY4Hrp9t2Skpr1RVdcqNCkoZgy8l98Fh7gHGftpyREpy4r7QVEtJDIvAxrNCVPIY7H30zis9zlpmqDb6viSvGQwuE/njGjHvjqF04outll6h9NNuPT7ftFwobgluqolVWkgeN5VCgt+7Z1bAPfB9Boz9Zv7R5uqu07ptGXpHZkhuETRxTuBmmJ9JEHchh7YxoD6rmxpaShOrGiZAJ9P8AMLHktqusm3P2qlFM9DR1Qpp6gIeEMsgYojH2LBGx9eJ+mpHp/wBPr31Fuk9msSrLVwwGoWHBLyqCAQoH0ByfsNXzprbuo+7tgbo2lsy1RVtuvFdR1VwiLAStJBzeLgCQCQXb798D1OqtVWPqH01u61qrd9v3WDJRljeCTB7HBwMgjt7jQatdxa6mwgO5IV17TVoPbauAqRgmYnofL05HqtJ33o3tii6VWip6qn9nbmqY6iKnudZXGnaIRLiJnRjxZjxCKp9V7nvjTz4aNvdOLptncG1eo+5KkUl8tU17AKcUt9dSfgkibHYSIMZIxgY1mTem/wDeXUI0E+5r7X3Senj4qs0hbw+/oB6frjOnu1qLfddSTWSC7VtDbK1VSojMrBJEB7KR6498emsizs6tuxxqvnUcg7DPL16bKn2btbjh9D/unw7JhokBxJMCSDpyAOgAgclrS1dU/hw2XSQ0X+1lddEhlFRgqpDSdyM8eQJ7/TU9duv3TMbffPT4XSOpplraKnqlmkNSDJj+BF4jyt3z7Y99Uj4ffhS2l1DvCx3KunnpLdTmsrw0YK8F9AuPwkntrW1k2ftqWjj2xtPbUax2yNKUR8R+7GMqGPtn11Q4jxFtq4WtsNTschpA6ZB5clm9oOIW7bhlBrv57vEJySA4TEgxMx9srDu9viOt1oBtuyOmVq2dTTVAqoqu32n5aql4llxJ4mSAVZsgE9jjQdtG+987H3pF1H2RuSqtN+q4Z2Sup2CypHJmNvUdiRn9Neg/Wv4Nb5unb9WKOqp6x5Y2mVVjy1JMBlSp9T9D9RnXnhZun+6rhQ3fcPgxQ09hmejrI55OB8ZQcxrn1bkMY1rWj7g09b8OHpnpyC6ThFSnd31MXDO7pE+ISSIjqZMTk7qP3/1H31vqoet3zu653uumVVeWtnMrFVJIAz6DOfTXqb0G6YUe1vh3t+3JqiV56myUlfIj4wkoxKQD6/xsP568kto0Em5t32m1VEnE19fBTu7eiB5FUk/YZ17fbqt1PtDp7WXP5mOWKGJbbSRQnkXdgEA7emFBP6a0wHYDjJVzidWhVrE27NLBsgtIk0NW/glZwGBi9OKY++uPeHrqlqWaMRiM4mdR+H8vrrlPT3Kolp6YKUjyHwFwMZyTpQ2i3088tfB83NLO4DEdghz6Y1W9Fgyk6o08MYpYgBTx/hkY+diftp1SyAwiHlL4fHjyLcWzj6ai4lihYSyr43iyFfDJOUIPqT76dRyVc9S1VLR+FBxK83X2Hp21H1ThfIFuDzcmkWCCnVVDE+Z/1++piZjVlWgiQMB5+R/F/wCmoGlbMnyK1LSKknMxspyV1JT01DRx8a2onEqkEeGCT39ARp1FJR19JHIaeCRHqTlQj9lH+mujV9ShjgKcGQ+fi4I/9dJViW+WON46r5epjcsPEwOR9u2m80FRDULU0colfiOSceKhj9T66bA3Tgk7KkJVtA0wlpQ0Kt4aL3ARfvnXxRH4sUzPDFGT2Xnyz+ntpOqq0oVHzNLMzuMsGGAT9tcimheEVklFEoycMpBJH2GlAcoyVyerqIhLLDRERO2DKG9vtqA3LY7Vvejl2vuahaooJwCniseSH2dT7MPtqfp7gsCGSuWZaYnlCHhJIP00tVpFXzJM8UhjbGSWxx+n304CTXaShXUdFtlUdFFBMauentVK0dLBG/CNRktl/VmJJ1nPqtRQS10tztdMIKegqXtjIvYIFJaL+YLD/wAuttbhttupYZ2p44xNJGQW5EH8h9dY/s6UG595XfZ90mEMF8rZ6dJs5EcwZvCb8w4H6E/XUqLjrPOArtJ5LJPVbg/stPiStsO0rz0q3xVySCz4q7S7EtiJs8ose2DkjWs98fFBbbVDLHt+lhVlU4d8M38vTXkh0c2/uroluq9bg3bTNQ0dHTiFZRKAtSxftw98Yz7e+pvcPxLUt0ukVve4tbKeZuLVDRs6xA+7Y74++rnelwIajOqFx8K0B8U3Wap6hbKa33qtSWRp+cMbvkrlWBwPbtrz83fSeK0VdB5hVxpUSEe54AD/AF/U6Lm+4d4On7Q8aC4W6oibwauAmRHRu3IHPlJHb9TjQ73VZrlBZLbUQCNzGJIHRGBbiDlTj8jp6bmluqd1Eag6CqKnnBA9WH6asW3dt3K906NTw4jBKmV+wUg+31/LVfaJoiFxj3+hGiz8P8/7SvdbtmpYMskPzFOpH8akcsfmpzj7aPAKarLxAMJGg6fRxkSyo0z+p5jC/ov/AF1NRbSlYACPAHoAMAfpo4U2wi5DNCAv31OWfphcLq8kVstktQ0a8pCq+VFHuzegH5nQneSG2mB6oB021HGMwn+WrHY9i19zqUo7fQSTyt2Covp+Z9APudG28bO2P05oRe+pm46K106nKws/mlOPwoo88h9PwjH30It2/FFb40aydJ4rbZIjkfP10DSzY+qQqCqn7sWP20AuDYlXbWyq3biKcY6kD6uICts+xNldPLel66nbkpaaIAlaWCXzOcdlBwWc/aNT/iGhbu3rNU3+9UtPs/bVVR7ctdTFNFSxJ8urhe/jTHOWc/wh2wPUk+w+rKufcFxnvddfZdzXh8g1NwmEUYJ+gY5IH0GB9tOabY289zqi3S6wRUA7CKnxKv37DCZ/MjQXVWPlox++m/2XS23BX2re9qQZG4LdI/8Ad3hB9NXwK63zqBWXe9VQtqRUUNTNLIhLq/FSxPd8lRjPoAftqLfc1ppHnlrayataGLxFapL4nk9FREH4Fz5izd8DsB6agdzWtrPVtbbIKiLwJJop1WQM3FCByYgDAOc41WV5IzIXAB/EfXP10qNhQA8DY/fNSvO0t9c+GvULowDMxG2kQB8YnmCFP3G6XiWF0qK1WSZ+RpFXigJ9OKj1/rrrTWCvqo/MvhCEc2QHkyD6t7L+R7/bTC2pWVVRHT0SOZJMKJT3YD6A+2rZV26uho2tFmUy/LMktfMCAqt/CjMe2c+3qdG9xwo0xLj9FmUqbqts+7unxTHxJdvAJ+p5KvTUVSjeHDRVABH/ABJQRyGnENraOESVQU58yg9v1P2/PViisNRbaFb/ALxmaKNjyhpj25D68R/QHVP3HuWa91JECCnpE8sca4yR9XPuda3cCyxVzU6cm+vn/p5c+i5oVnXrYo4HNxzPp+vyVhse5p6B6mit88FRKwDI1REGVz7qM+g+n5DS9Fv+8x1Ms9XDBJ4efJ4fh8WB7HK9+301QYJGhdZFbup7HU8JDeqZ4YWENYUGSR/xF+5+v31i3NBpqGo8TO5K6C2uq/cNt6FQtLeUwHD9fupq474roK2K71McFTUQhYlSXLRlm88hxkH3UfppC89VNyXm1R2kU1vol44mqKenxUT98+aViWUe2E4jt3zqOvFnnMcUkcQZpFSVfNnzcQkiZ+oYZ/Ij66cW3acUsML3N41eQhkiV8MQf730GjUxSbTBGypEVKry3mmlTtG826tFBfaKot9VJHFUeHMuGEcqhkkYewKkH64OTpg9pqKCvWOvpJXp0n4O8YJWQBsMFYdj9O3vrQ+2ukDAUS3myXC6VdVGstJa6INFCIuw8WoqiOKRjIzwy2Pdcg6PnTzpRR2CSmq/9nl3BuCWQJBFBSl6C24zw4p/Hg9gT2yR6kk6gLgudpaJU3Um0ol0+izZs/4aaaai/wC0HqfeqjZGyZZAaKGpQNdbhn0jghPpnthm+vp76G123jbdu7+k3B0rp6qyUlJMPlI5pjOWVexEhOQ6tjzKexyce2tY/E98JvWeS1HqJuLeSbj3DAslVFZKeF2pTQL6rASf+Ko/FHgZ7gd8Zx/tDadb1I3VQ7RsC263VFwmKwNWVAhhVyPR5X/AvbAz2GnoVmVi5jjkbj129Qeu243BSqU3U2tfyOx+/wAfL8iFcOoIj6o7Wh6i7f2eYLlQ1MVBef2ZEiwKjIBCXhQZ5lhjxAMMCobzDJr3STe77L3QYK5V/Z9zX5OsSRT+7JPllA9eSN/QnUptaGr6U9SLzszqBU3a0NTLV2a7Q2xoZnMwBVUJLeG8XIglwT5Tlc9tUXc8iy36sclywfizPjLMAASSPXP199TYS5zqThgRCCQBnqtnVO0CIlqKdRJDIodHUHDKffUFW2OVB/w8fppt0E65baTZlHtfekjLUwO6xVPIElCewIPrgk+n10a7dYtt7yDGwXWlqCPVQ/Fx/wCU99DdLcIUCUCntDAeePt79tM5bZTAgSxLg+uRo1Xzp3WUAYfLlse+NUS67dlhZj4bZH20IuIRNCo1w6b7R3NGq1HiU7q2Q8RHY/kfUaFPVPZ1Hsu+wUlunaSkqaZZULADzAkMMfng/rrQe27Vtt714O8LxcbVbzDIwqaKi+acSjHFSnJfKe+T7YGgz10pNtQbrrU21VXq6UaRwvHW3GjEMitg8kVVYhYx2x7kk50ajU1GCmd4TlD+z2up3BcKez0JDVFW4ijH1bBwP6agmQqfMpVs4I9wfvojdDAsPVKw1BplqI4K5ZfDZ3RThWP4kIYfoR6abdYrTS0m/bhFbbNBb6WVhUQpAzsrI45cgXJbuSfUnvqYrsFbuTvEqv7XTFf2efFGr4bbrbv9lnbdq7jtW7tu3ShWouFLPT1+JMYMTJxUj39VYH8xrTPXP4fbRvDaddRLbI53jR3pCVBeFx+Eqf6H89Y3/s2aq97V3pufdk1BLHbZbEqGRYyEfjOoGPqck+n316G3jdXHZtfuCvnFNDHSSvyb+8QQijPqSSMDWDxC7t6bajifdUre9oV6rbdr8udpxnJMfdYOoPg5vEMglustgskZAPiV1zp4zk+3HmWz+miPt74Hfmo0mffFvI4Fz8nRzz9h6kHiqn+ehpve7dWL3t+WhuV7a7UNAwkraqClggCKrAKrSIoJbljGO5xrZPwj9YKvfm3Dt3dKU9PW0EcdOKmqbi8iBchyvbLH9BrzriXausym19swEudp8TjAJwJw0iTAyYEgkgSV6Pefw+uuFUn162moKbQXhrjLdUaYxpc2DkgTPJULoFaNo7LvG6dsdO91VF6viw+BXx11o+XiiEbeZVLOSTk9wAfbV56c2Ubdn3NuCru8c9XcqlJZKcIUWNQAqLGPoO+ffvrMO4uoF3+Hnr7uyWjq6K/R1FwnZ55FMat4jiRgmD2buFz3HbRY258UvR69oWq62axVUgDyx1cZZOXuA65B/XGrfDOK1X1HVLimNJEiJgOgCdzkbei81/jd/Dy87O8S4fxTg01KLmB3V0GDBAAcBqzkZ5jC0VY9/UFsSs+eA4kKQD79iNeTu5eoi0MPVCnWyzVFvuu8aqrSRYyIg6zZUZHqcp6fTWvL/wDEF0yqa9Wpb5WXCk5fv3t1K0ngpnBlfOMKP1OmEPSnp9Rbfa9xdQqGfZdbK9QlJVLFLTvI2clScMrZJPr6+2u1sOKsqgUD7xXM8J7QPNRllcNLaxGzgRvB6HOkgid5wsl/A10QpOrvXq1VW4ovmNr2nxrzuB1PBIYovPGjv7c5eC4Hcjl99egfVHeFBvjcXyG3oBR2mhdlhhhjEUZf0LkAAZOP5aHdk3vHcdvUeyel1sttr2tRIVnkpaRaZqyRTgNJxA5D1OTknPtp3RR3GnppvF5zSySZSTlyTH3x9NbWvSCCZP7wunva7aj4Y3TgcycgZOepypKorfkOBMUjTMRErr+EffJ0kihwsNxklhGTUSMp7kKe3fTWWi8aQrV+HJJGo8N2YnP2Htrv8ssDR3KpkeOFcpwY5Bf6H66gYVKeqWqlhkpVnpZFjp6hv+IQQ2Pvn0/PUfJc2EiuJlq1jJBQse3bAA08hjuF0hqmp1WenMgYLIOPEg/hx76Umkt9HAayqoCGfKN5O4PsQB3J+molIRCYpS1TqahoooKpo+fd+KD3AJHc66/tGrmhdql+fjJ5pI04gY7fiOmeY6p45quaaF42KpE6Es5x28v1xp/FS3t4EVbYoi9YvFXkxAUktx9B+uniBKYZOEjHRI0hkknSRwokVlHMxjH27HXZqerrKlovFqoT3xIYwDkD1H11IUklFLBLLBIKiaONeMajw41+uT/010oqu7VtRVxfMU8MaxcIJFXIZie/31EmNlIY3Q9U3SSBfn4YkiUkedgXK+w7en66XoKKMBQ6KxTzJHEo7KfuffTCO3VggY1ju78S3eQAZHudSNLVwPQ0zNSvF4xIKcAe47ZJz6almVAwml6kvSAJEIFWTtGzks4I/prtK1XT0QkdlpmUKzyuR6fUZ0lV1dWaqoEyxosY4wmLzfnnPofy03pb7RVaLbWojLmMiV2QsUA9Bn0GmzCdNrwsdVZq24wXAVMzLg4lDFRkZOB6D01lG80UW2d71NXTKzS0VzNVCJPRWLhxj3PtrbFLSWiHYt88WKKh/aDQ0kLnHIgEP2+5OBj3xrOHWTpVdaOpm3fbC9ZRSyh6pQMy0/phjgd09Mn29+3fSpHTVg4wtGlTPciAk+sG9K7fuyKmnqbZQgwtHWpJEpDrwPcdyfVS2grsi80+1t+2G+VixtRrUinqvFjEimGQcGypBzgNn9NFW1iCW3tTzDkGUxsP+UjB/wA9BO+0jUbSW91YPTStHn/CcA/yxq5TMEhO1gaIR4ttw2RtTqq1C18ak2XdpBBWOGb5aB2HeZIyhAAbtxGAQTn01IX7Ym1L7cqih23dIDUZaWKnZTGaiHkQJkRsMFOM41R7fMK+x0VyBH7+FWYkfxDsc/qDqib9uNxh3Bbq1amYVBMQjm5kOpSTPZvUai9rSAxoh07/AJHl+arW1jWF6a5rHu9BGgxEjIcDEgxg5giMTlTG9ujd6tl88K4wVNvikRGSc0ck0Emc5IaMH0wP56MPS74St5be37tbctnv9FeadBJNcJ6cNFTUyMnFY2kfALNyOc4Ax3+mp/p91tvVkdpb1bxUWqkmBqVH4kIPbyP2YH0OCPvnUxuz4sr/ALnvFDYds08Vqp7jIsHzZYNNEWbgCigCNMZBGAdNSrVBg7q84taNt0Yb5B086b0q1u+t00KkqDHAjNmVh3KouBJL9OwA++NBvqP8Se8rrbxa+ltDS2C3A+HFWVaq1SMj8UcIAijJ+rF3093P09prZaKHcstdUXA0tXEtdPcH8eSoEjhWLO+SME5x6alOuFvtdl6PXGvpqWiWqo2grECqkbSGOVSVXAGTxzgDUnCq4nSY+Cv21SwpsmvTc53k4Af/ACT9VjXeclwq7lUXDclfVX28tlpaiqYu6j/FIT2+wAA9tNen9hodwTzG5d2p2R1jXyhuWR7euMemld6bjpLruJ62lpJYqaZcK74HifXGCRqtXTcnh1U1Ja6CGGFYzTp4QYGQcgQ7HOS3b7fTU2tqFhad1n3tYXdQhjBTbjacD4kkn1PyT3dRho7/AD/slg9HyBCqMcSp4sB9gQdFTb3VLbW3NiUklynaprA0oipUOWyD7/QH66BxF9rk8SKmcJH6lE7L+Z1Nbbt21YyKncnz1ZJnJghKrGfzYnkfy7al4WgCoUajY1azSKPiA5r5UftTqFumvqbJRmnSvnaV42k7Ipx2Zvf09NW2r6M0dmtK3S7bnSJSmFQU3N3kP8KDl5j/AOzpY71s1EVk2/tinppo0CrNI34V/wACYB/U6rly3XVVlR8xW1jzS/gWSRvKuT6IPRRpwalbw0Gz57AepV+34c2g4PvnBrf6d3HyAE7+eFO7Q29QWd1qa1XmklbEceB4svfsox2HsC3oPQZPbV43Nc9m7EtsEl+roP2vIxmS208IkSmB92we8hP17/Vv4dCSxUm79zXFYrdJLCclMq3qucElvXGAx7ewP2BsX/Zrsy3sKXcO6YPmyPNDG7OyHkfKWHbOCPrggZ99WGvpWLS23M1Du/n6N6Dz3PlsqnEnv4mQ1w0Um4awch1d1J58vVD7du7q/dlzkrKgusOcxxFs4H39if6D21BqzM6qAfMcaI+4uklXT0L3LbFXDcaWMZcqe49T74K9gT5vYN3yjHVCpqmvs1dyj501TAxU5TDofQggjsdDYZHhVUM0CFJNt+G3xCovdT4IZOSwKP3r/p/CD9T/AC1Ytm7fFxZr5LaaOrttAiS1dN43GWKnLKvidiG9WH5k47aqVRVyXCk8J0R5vF8QzHIkYccFSffv3ye+ffRA6L9PerG/6+ei2bQhaX5b5aruNVEohpKflk/vHGE7j19fYaC/vO7JO6hL9PhGUjva0Wh6/wCf2rNPLFI6q9Jy5NC+MHsO/wBMYB7e/toi7K+H2a22Zd9daL2u1rPJHmmpmUNcKseoVEPcA/Vv01cqG59F+h92pqCw1NHvPfk7x073J1X5SgbAUFEPl7dssx5EZIHvoO9Tt87hv24BcdxbxhvtZcKbOIvESKjIlPHgpwCwKBlJz2YZ79hRFZwIpDmgPugHAHLjvuQP3yR96cdX6W4dHbnsOq3J/s/ZbZf6Y2q5VHdzFIG50px3KEhWIHplj2x22/0Tu8VZZHtVqovlLpawFljldXFwBTLAlQDJlPMjfhZSTjkpx5Q9Ro6u67Itu4Kakkjpa251tfO/hqg8ZpAhJRPKnZc8R2HLWnvhj+IHcdJ0r8a1VVIu6NvGK1xSVa80elaUGnL4IJCPlM57JJ39NZte4r2V1TrF00nkMcP6Sfdd1yTBnqDiDPR2VtTvLAt0/wAwAvB/qHMfADHyXojcqW1XGwvEIYzQ1AE1Cjtx8OpxhYj2AUFhxOcli2STrxT69Wz/AGF6w3G8WWzy2ukvA/acVBVR5+WaXImgYYAPGQOAR2wRjXp9uXdq1lnnuO3bjToLjMlzpFU5Wmd1xL+875ByRlQMKoAwcnWFviC21XdWOt1BZNoRVe47lXMy1lNTL4xpUlk9gvdUTBbB/CPUjW1chlKsysN8g+kT9wI/ysmjdN7t9J22D8QY+oJ9cLLHJZJWkVVQschU9B+WrDNsi83m2VW6oomNLTr55O2HkRVLqPfIU59PbRp3h8Olt2rWvs5rvS1d1UrG70LrUxpU+Fz7TKAvEJ3kUnyEHBcEMM+XevquaxLMwjaIeQHsMjvj6ZAA+41OjWNd0MwUJtak5+hpkxJHRLRUcdVQ08sD+I8TMDGo82M9iPrq9bb3JuG23Ciu9jqqpLZI4ikQuT4EijBJJ7gZ76iNgbXlvlMlQbZUVEUcrEywycQhTDFX/MEYx99W9UEwmpKiBo4kBJ4KfL/66O5urzQqjoMFXnbHxI9RNv2Kuq9wSJUUlFIsCLUR+Lz5HsUJ7/11drf1/wBqVtJS1u89vx0kVZjhNFIYzg+mVbIHb76Fdsgtr0H7HqoGmkmdfEjmj9VH4Tg6id2bRoxXyXzc9yeC0RFVggKEKWI9Bj1zjVTSFDW5hgrQM1f0u3ND4u378qu38LgH+qk50Oeo/TrddbRLS2RDW2+qyKhoDmRQCCCFOMrn1xrNlypwlZI9nkmFPyJhlOUYgeg7e+pSwdQeoW3pFSh3TdabjgqhnYgD7BsjGpig5okEI7nkhHvpd8NG9qO6VV0gqi9VSxMaGOOJh40jp2Jz6Y5EY+p+mtM7++HLo/JU2Sp6ltt+xVNuaJ46auvfy7V1EAOaSBfP+INgr7k6Q/s35t49Zp9z3Ldu8I/l9vpF8vE9Mih5CCxLMMdgBq29euikPV/qjNu9yamGntkNpt7xRs7Qupd3fsO6lmA/TXL8cEOFzUe5sYEEZ6rzftR2hfauJtyWgAtcQJLstOkAOBMGDnbJGVaf+2z4WentjpbXtO55WmhSm8K30ryqsaDyIjBQCNCTd3xDdPepe4oWMG6q8WYmWjtpKUdJF2x4gQFjI2P4m79+2NUO7fCd1VrKgUs13t9vgUhI+VQqMw9vL650ntn4b4aa4stF1Zskt6o35yQ01QZpYwpwwYLk/YjWLeVKV8Cahgnk0EeWY6rnOy76Fm5tW1rFr/waR7rpmfdOZyecmVYL71VsVLWW+gfp3U09pmAllNZVtK/DJwyxAhfXv30Wfh3vtj3fv+uitstuq7TSUZkNP+yfAcOzAKWYk8uwbQ13Zsmx0duhpL7eVlo/H+ZWOmo3eV2IxhpHYEr64Hto0fDR0otzW+s6gberayhhlmNJ4DIoSTgB34j0wT/nrNtuz4Omo63JaDJGIInzXa8S7YdtzYO77iVWSIA1EAyRk4kOifdMIMfGlb7feN6LYoLZ4FJSQRyRy0wxwnbJbIH24+usy3C233bk8dFV+XkvNcHuw/00YOo+47pufrJuDbtWsqwxXSRRVN3WWBP4gfY9iMa5YbZc7Gd8dQ9x0QEVBtar+TjqEJMbSYjjDBhjJ9f11tubTt9FvRYNIEkRzJwAu047xKpw/s7RrcTrufXhrWNLpLiYjecEz+ygrbLtvTbj3GqttvWW21lOlDUMw5EeIxxge3oe+nW17xXVlTW265TTS0CR8VoizGHxz2LlR2yAcZOpHoAm9Oqs152vYaCKrntlMLjO0jBFmRSFEef7xJOPT002hXc2wbdXzVyw0Nbeg0fhSrybzscdvYj/AKa3bO1DbhzXtAI2/VchwzTccZrtrtb3rNMxvGkaSfhIHktw9OKHa8vRSae2rDC9FFCKt4GHPkrcWz37Z5aSdIP2ItJT1MrrCRKHVzllx9R69tZY6I2lrXJPUJeKimjnUJPCHYJIc/xLnv3+utHWKuRVENPXPEsCNiOUBmZiO3FR6j11p6NAgcl01d4e+YU3B4FveOsNUwSSDhFB6+f19T3yfc6a/wC0lXVM4ktcpjpWwIhHyyx/iJ9dSUltljsKXaprZpGplMuVAyF+gHtpK3pW3n5Zw/EEFkCHDOPUAn+XfUZjKBBK63AV1TcRFS1LQIIVzhioYN+Xp37a+1EtDbUikF/p4UdsOsmZCPft7/XXeNvHmk/a6yeDApIaNiqqA2ODe51F1kFPW3UT09ojip/DYw1HIKFi+mO/Inv300lJS1LNDHVtW3KUz08o/wB2bh51+pI+h9tNY7zQx1xkSrmqpWbhiSTBUN24hfy05o4qNWnlqmkhiqEDKKg45dsA/l9BpCCipkqHvVPY0i54Zap8YOOw4n1B/TSAJ3TExspSspErYnEkqvJA4zGo/CnqMdsHHv8AnpvHcLcYmqZkkKQJzQqnEA/4frpglqu9I0NnlvLN47yTSs7AdyclR9PX30vDTQKWpI3FVMF4tIikxxr6/iHYnUxCaeqHzU9XSSIlOsEUCAgePIWLdu+B7Z0hFVxS1Uc1SGaFyQBGnlif6E/w6SArkucdJwlqIoO5LMWBb6lvprrWUzGokmpZ6CYI/ieCjMQuPXIHbOoknknBG6e/KVFNWw1FPXxzqJBK5kYMeA7EKPTXemRoWqGa3h05E4RvqfVvp6+mNMoLxT3B5JKSlqpHjUIqiLhGpPsp99KGe5fKzx09PUQVBTmWcCPkfTjnvybTA8gkCh71kpN91tmtJsNtqONtq6idZI35SLK6qF8pZfLxyMjOMkY76JdgvM4pqGoqoDDPPTp4kbLnDMo5o2O3rkfTX2OKulpZYq5nd1KspYY8uMdv1GulLErQGlkH4Tle3cfTGqtyYWzQP8ppCq25elNDWzT3LasC08jtyejGBGST6x/3f8Pp9MazL1W2vNRbklpJo/l6po+bxSKQ2fTsPfONbIinlpHA5syZ4jt+H7/++2ulws1o3ZxprizQVdO4kpLjQkJV0h9fKTkrn0OMg/TI1OhdOG6k4NdCw7tveEtssslnNMJzDI3As2FUH2P650Qdm7PsHUiqo7Xe0UfLOJnnQ8XKDvxBHfjnt20Vqr4N9jtVVNZTb6vcM1QzOzSIjsXY5YuSByz3+nrp/sz4cLpsi+09wtG8KG60MeUenqIDTylCO4DAlT/TV4VqZcDKi1jgZKX3j08oNv3GzoHAtd8DWmVJFHIOUyrE+/v6+mNZSja4W67y0EvJaq11DIfqskb4P/5LrXXXy1dRNz7cpNuWLYdzqDS1tPcIrhTyCTwpIie3CImTBUkcse/66y/eLPu9N/1FduDbNzo5bhO88yz0TRkc/ViMYHfudH8OrUCoEnaEauqnXSPd20qralhs8iUtwpQtVUygoyscMWgT1k4uD5s9saDl93JeN2UprNwXirrHhVUiaZ8xHAwQh/8ADbAHlw2STkjTyaGues/ZVBSGYleIWTzqOXfKr6hgfvj7eurZt/pJUyj5u/Svlu7Ke7H9fQfporPENSzqly9zu7piT9EFq2geoUMtOEiUDkxjxyH149/N99Kbbh2pUVE0V2uPyUkQyGqIyA4H3+v21o2q29t210XhyQQwQ8lRpHAABPuSfTQU6l7h6d2esmt9JRR3esRZIX7cY1b0B7HII9Rk/po7HU2yHCVJtF78vM/ZKnce1rDChgeseE4IdKNkVhn1Bfjn8xqr703nZL5JDSbdtE1PGvZp6kx+NOx/5VHFF+gyx+p0P7jd665T+NPUTHA4qHlaQgD0GSc6+WwL80k8zMqRsGLj1GDopNFokNk+attY9uAY9FaPl7pVoBV1LKqrxRR3A+mR76jqDbldWXZYqoc19SwOQ3fAAGvrbjqmmZaLB5jiOQzk/UDV62zx25YajdV0/eSxgLAHA/ezkeXA9wvqfyGqz7ms9ul0AdApMYGmeaS3duI7JoF2lYakJXsga4VEZ7oTjESn7ADP1IHsqhRwaiSZzNIzO59WJyTqfobFWbk8eqljdp3Zp5J2c/hzjOPcZzk/5ag3gShr/l67mY4pVEpiI5Mme5XPbJHpnUWaR4RuplxKl7BuzcG3q2OvtVzljdCPKzEqwBBwR9MgfkQD6gHTvclzO9r4lwlspp4XWOMw2+LLIAoDFVA8xJBbj2AGFXiAMT3TDo7dOp8V0u9FerXZ7HZg8lZX3OpEfhooz2Qd3bGOw9yNN+nu+5ume7HrrZP4qxSYiq0QeJGQe0iZ/qPpqJ5lu4UmuJhrk03r0nuPTyz0F2vV/tEkl0T5ihpqSo8WWSnPeOZgPwBx3AJ5euQNOLF1I3tJsGu6fWTddZQ0cs3zclFG/Fag4w2D6jIAyM98Z+uoff8AQV0dyFxMstRb6keLTVDDIKtnCk+nscfXH5jVZpKqqt1VFW0rlJYWDxt9D/01Jo1tzlI4MFdrfI8FeqspDB8EH1DA+v551OVkkc8U7iASNMgVGP8AAeQOfT7Ee3r+mlblbRcXo9x2mEN84MSwqMlJh2YY+5/0+ui7sLY8G7ts33cN4RaCmsUMlyqjHAMxIiBTHgebzOVAHfADH86d/cMtmd67ZZfELunYMNer7uB9cK3/AA6Udj37tq89Gt5tT2mlvSx1VnvVWAUoatgECTn+CGY8V54wHC98NqPoOhPVfoZvi8bS3Xt2otqVFE5FRI4NM8WfK4cZV0JAAK9ySBjPbUHtGp25TeJcWpVh5QF4yHc4HqVaMgeY+2Sw7+2tz9Et8bKuXS7ae2+rO5LNvjaN9qp6SzXKqp2St2rcApIo3aQszxt6KRgLlR3UjjkVKTr9r6bPDtMjBjPzHVanBeMutnBj2GGgxJ6jbnjqozbvT6e/bHWme8xbd23bQYqi41BxEEBOUDeucZxEpLnPmKDtoY7+3BV2SyXHafw8WcWSGrQRV+466Emtun+IoP3cXYcYx5R7g+urrvreO6epF9o6Kthit9mtjeHbLRTxiKlpogxCkIvYswAbJ799Giy7R2nuuz2/atFSQySuokr6pBhoVH8I+5OjULynXcWMMwYXP2V/SvHuo2pw3E9Y6eS8mt53Dq1tOrG3d33i6wq8TCNTUEw1ETfiKsvZwfQ+/sfpqlXOlrHp4bm1NJ8qT4Bl4HgJAM8SfTOO+NewXVr4O9m9Rtr1W2KtGgHEy0NSozJSzgeWVD//ANL6MMg+2vNLcm292bO2bvDpLdf3dXbNxU4q6NVB5zxnw0kTtyIIfIx2w3cjsG2KWlmwA6rXpU2UneFsT0CRt9bQ7b2xYqIV81JUxwPPMKZcvUPUYOXx6oq8APTHfU3TXWroLJPaqe4sFrOIqlK9pADyj5H1IDd+2qNfr9+x78aWnpYWWgt9PbnYHkPGjTzsD7+ckfTAGndsurJBTR19U9TJUvlXQAlAfY/Uam1upoKlWbDsbK6Wq5Sy0dG1xEKXZeakwyGSNhy8n+E8R3GT7HtqyG41Uk9RR1FPT3KlWMGOGbBQSj+8CCCND6jvFLFJPgxcY8J4qnHB8++dL1W6RRUlVFABVTRgPPFz4N4Z9wdVTQiYQKhc8rpvOl3JebLFU1u37fbobazsTSoAvBvXDZxjOOw799UHc8Yp6i3x+JlRQQtnHbLZY/6atV323e32a1+s1dVTbfmnCNBIzEpJjPE9/MM++iXtLbFHBu+Hb1dQ01WEpqQvEyLIBimViDn09fTTGu2jTL5nTOyHVri3pOfEwNlfPgCoLpcJ7qsFyqoqJ6lFqKeOZljnPHtzAOG7ex+uj1et6Xm49Sb/ALOnrLm1shrBBEtPUunhhcDCcSMDPbGgdsqgrbJYqybZ9NBbKyWfkaiJniKQgklVVCAWJ/ibPbRS6M3KWeo/34yeI7ljJL5mZic9ye+TqlUFAaq1QTP0XL8dtLZlN12+m0u325xHzjmtSdOvh5sFxs0ldb7hb6C5GIGCSUeNKHPcF2Zi3r66zbsP4dLzs/fF43lVXrxqVDURTyLCAgLMcsG9W7jsQNXLe18ren0ct2ttJPPb7irI7xKSYXb1B49x9QdTuxepFn6i7B/Zj0k9GkLtBKpUrLHKvo3f1DDB1kVqfDmOZplo55megMz9FxnD30P+oUqlpTLSGuLjMyQW6RmYxOQgzuWWq3LuZLMk8MlKr8EaFMPGT3ywb1GfXWrOnC0fTronFRVNR/vMEVRVNlccncswA/oNZ8tfSm9HcD19dfQsEEvKF4UxLKPufQfloxbyrX/2WioDNlWhCcT7jSr8ZpMmlbiGxHzW3xGteXVRjGs0snYrKG2Nt067tN53xCaiKabxpVUkkMSW7/bJ1ZfiTir790ev1s2bNUXGrvc9MngMyqIadG5uF9PoO2pC4WsxSSngymQEHv27+2ms1quDQwQ0cjOcZK+3cemsareValZtU50mY5Ktx3hlW8vLfiBP/iIIb+HBnb81Q/gs2hdenHTvf+779bpKKtq3joqYSjDFUQ9x/wCeT+mhVv35/dO5ag0VLUS0lBOIS8yjiGX14D1Pfvn662k2yLvN0/obCq+C7VC1dQgUkOASePb74/lrPHUyn2ZSVr2PaEEkt4jqi10lopv3CrjvEfUF8nJI9NdBwu4qXT33UbrS7JMuritd8XrDSaz8A82tAaPsUw6Z7YrzH86ELJTYlfK92X+6ff8Alo0bXtHyEyXWSAJNXefhK3/AKnGVX1AI9jqqdMI9wKnhy1FBQ2uOIshYnxCO3cn3J/01fKe4Vl1rqaOno2mgoo/+NKoTxj7YB7kqe+D661JJEldcaznGDCnKcMKKKppqGplo5SUPfz8sdiIvbJ9z2xrlvNSs89XWVrIq0veRcL4f1Up7EDBJ+2uPbLzcq4iorGpqRVBWFm4TAAcuQC9sEjGM6+VtWZHnWrhaOJ4xThVC8ZfbBPqfXOff008ZylrJ5qPtscM1TFSGukq6OoSX5mdH4OrfwnHuM9vvp5b7dVW9TEk8EVAAscU+QxTvgjie356RUx0kclvoEpaWKmZGaWVAhLZznA78cdxrtdYaeero55q53amiLxxSLmGozjBI9QCe2e2nBEptXVWeO0UtL48nywqBIAyuWDFiB27d8DOoGS93i5ELU2eCKmoZjG/iEKF79yF75OMHvpWC4bih+Zqah4DHSqPl1p0Kxhs9wW9SMfb21D2+23VK97i96gmgRuQjRmdHkZu/IkYbA/lp9UZSkJ9UWagvNStOlRM01KfmpZWjYRHt+H2yv5aXtLUJqKuOOYUyyYWPjB4cLcR3Iz65+uoav3FueteeloJqSKV2CLFjDhVP970xgdtdloKy+xmpuMNMEkfhHF81xZiv1Hocd+xxpyREBLUqhd6q2ATzVVf49NE/N4opFjKHGO4Hrqv2iv23bzLdI6KSoWVeLrIOSjv2BPv9caetPYpqVbdTKlTUsvF/lkOD379x6nGutVTUgpjBcrTMGpm/3bgOAZj6h+/r6ajkpbKbqavcTUi1Vk8GKFWQBpI+KBCPTGulDS32Zo6yRKOWVM8nzgDPt29tLVtwNt4z1PgrB4cZRpQxDPjsO/Y+uABpnQ1Va5qKm6pUVczHMUUCfu0P1HoMfb17aUxhNzS9TFX0BS73ydS0D8KmOBuSpTyEKGzj+EhWI9cZ0+nohS1OVwA4wvfOT7DUZc46WvikhrIHlJ4PGFVicL3OfYeul9uXKiWY7RrpS2ED0LysCXi/uEj3U9s/TGgVWB2CtOwqz/LK6TUDPMWRivIYVvbI+v8AM66pCYICPmDDKq92Jxx7d8H2HrqekgajURzKXiBzzxkqfv8AX8/XSdXQU9VGFcqQQSCDg498HVFzHNwVpaRuFywy3SVIFLeJByzmSRWEi4IwD6jv3z+X1OpiClSppVlaOSN2B5Ky8CCCR3Ht6ai7TQSJMtRHUrI64UrIuBgdgRj3xnv76sscZ9Ce2rDYcMpiM4Vdu15l2nSS3aS4zRRQKz4RWkkbAJIRRlmbAPYZOqFL8QfR7e+wjU11PcHrLNUyS1dWaY+LDBI4TnInqys2CADkBPT21F/FPZ1nods3mp3fPt6G3Vsvh1CU0sqioZQUYmM5QgKwBI75I1ZOnXT3pnuHYi36ot9pvM24aDw7xcaeFolrWXIkygIKeYEkAA57nvq1Ta1lPUUJ2ougJnY9nbG33aFum2bxQXeHssssHhl42IzxZcEofse+pKHovShjmdaeHOBxd0P2/CwGdDm7W2+9Or1aR8Oz2K4WSndp7jRw3OnaqqZOWGhnMjhmUr2UjuD64wBot1dusdy3ubhvmgjlpK+30oscdxwaeCQBjUQ4J4CckocnuyjCnykaTgBlpwVNjDzVVu3Re6yRS2/lV1ME6cXAqiwKnsQQ+fz1Q5/gV2lVMJEudTSchllWcvxP07jRzp6Pb1PfG2DFBd6EXGBq6njprkfBgWNlUtHwfxIMl18vZGIOB2Oq1Q19/pdl7Jq49wbmnluVc9Hcmp3jqaqSUQzLhfGUgKJYMlfucfTTNc9udRTd2AUBtx/AulrjkrKPdU5giweTKre4HpgE+ugX1Q6d0+xb+23qavkqWWlgqJJDD4aI7qSyjzHIX0yfXXpRL4tdsucTvXtL8u4dq+mWCdipzlkUAA9vYYPrrBXxWUVVHvm3NEzBK2hXyg9iysRn+WNWLes91YMLpEIb2wUMNlWGW83hIEQuOQUYHqdWHqTuCga4x7WpJD8jakMSuvdXmP42OPv2H2A1N2hIdhbJqtwTALVyoYKQH1MhHdh/hB9fqftoSmVqiR5ZW5u55MfudXQ3vXFxKcgAQpehvVdaWzTgPGy8cFzgqTkgH6HXaa+0tVVVhq7ZGsNXGFVY/WJlHkKk9/z+uT9tQ0fPj+6kPAHuv/v30upjSYPOG8PGCVHdfvougRlC0iUvT3SvpKGe2UtdLDT1LAywBzwcj0JX00nDIWyZFWMgkgD0GkqiJGiLHswPbStIEkCiYHt2Jzpy2MpaQTKtm3lfc9vl2nVtJK6xF6DOW8IjLEL9u5OP8X11Ua6Pwz8rUK0VRTZidWzjIPt9NSVLWVFqrYq+1VMkM1OyyRSBiGDDv6j21Zt5y2S4mquc1CfEuFElVQSL2ZZW45U49QCJB3+mq5JY8CMFJx8GoCSPsoDZV8a21YhkieeBHFSYVfjy445AHBwSoAz7Y1oaTcFzvm1Ku02q2xQUG4amG5XKRoyJJyijhT594g3nbt5mA9h3y/RrPHUxkRnzEqvr3z2/116GbA6ZT3PpnYd9X5orXZZ7VT1UtwqyIowvhgFuTdvXIz7nsMntqhxOnREVqpwPvyWHxuhagNubl0NbmJwSNp8wdvNA/Z/S7cm9L1FaLDbJZp3dclV8kQJ/E7eir9z9PfRv2ztvpFsndNFsao3FBuTcdFUSV9TCspNItWQctj/xGQgniT79wPTV6v257DZ+l10tmwZoITPbJjTfKo0b1Exj8rdzzZmyp5Hv3xgAY1mDYHTTed13JQ7qj8Gw/sqRKyrr55FeCmwT5SQfMxwfJ64Pf11yQuqnGA9lF5ZGwByfXy6rzK0vbztrVr07eq6jTZLWgGHPMbuO4A6DrkrTG55rZt2mudwuMriYlKmlpokLzVKMgC8APYMrAscAe/tq1/DPve/3WirNy3i2LbWjqWh+X8Uu09OFUh8kDPc9j741CdPKbbe6KO4W17tVOamKPwq2tw/zoU5wwPZIvTjEuBjJOT21eqPbd1t09VVPJTENGVzA5wQffGMAdtY9pUHBrltJp1OPvHkPID8/ksvh9w3s3xH2W3f3lYka3HDGiNmDn5uPoAjFct/0k0H7plPH8OO57jWIvif2ZabQu8eq9xjX5rcCUNFawrFHNXEMGZSCO6qhOcfTRk3rvvbHTfbdTcrjdaevudPHF4VshqV8VmkyI2kwf3aEq3fGcA4GsaQ7k391wpK/cm9b0tRHHXypS0oHGKkjwoMcKfwqBx+pOMkk676yvhe5b7o5r1qw40OJVT3OWt3PmeiBNdTCpEiyQg8j6jueR76aU9kko51qKaYmVF5BD6aKd76ZXiySTtHAvgDP7zkAce3Yen66pjW26iPk8Ygj5HizL69/t3762GvBEBbQcCqy1VVQ0NVBU0gdZX5ZHpkH308se6KOmvFJc6+zvVxQx+HLDz4l1Htn6akKi2vCY4zTSEF2JUn0HscfT89MZrRHIjgBkYscgHIGpuLXCFLB3SloqjeNxyVvhzUNnWraojoopGMceTlUHf0Hvo59DVkuXUm/XvJkSioKqpRycjJCov8AnoLW27V9jooqOS3UVTDlu+SjnPc5I0R+n/Xm37Boq+GTp1I5uFOKZ5YqsclUNy7Aj66oXVNz2kMG6RA36clonbNukSlLSR58QHORgZI1cunVLNDVvH4aYZ/UD2GhBY/i26Wy7aax3DaG4KSpMiyfMiKOQDA/D2bPfUjavic2NQ0FbNtg3GpuzIY6KlmoyimZhhS7E4AB7n641y9e2vqjS3QQuQuaN1fUqlOpTLRJiefmtDdQOr2wuldNBbty1ktxu1WgeltNvj8WrlHtlT5Yx/zOQPpnQavPxC9TrvLJTbT2VbtsxoSXadBX1hXHY48sa+v31Wdm7Qn+ckv257kbluK6t81WVDNyc+5Uf8vcAY9B2Gr5NtpKmnQU89PQiVjEeHmYs3qD3yTjPqf01mvdQpHS1ocRzP5DovL7/tJR4TW9mshkYLzzPkOiZwbg6wpBFct1dS6+BeBPg0tLBEQT3/hXGfsdJU27OotVUSLBu663LwEQlKiSMxdx65ZBnBx2GdTNPaquihi4xvcBGv7kVS+VR6c+34snHoNLXahaWgZ/BL3lQVBXBGD7DB7D17eudVHveTqIHyC59vH+IVKmpzyZO4MAecCFWG331Fgqp2uNrsNySP8AdrSur0tRK3vxdcrjuPUamaPrHYbJTzVt12BuJK2lChIafwpY3b0JDEggZ+2m0ttq71b5JBQg1MCsA0vNeL4BwD/00yksN9paGmFPHFLUnkH8hLEn2AJ7kHuD99EpRqGpq6ey4teVXNFZxcBggkwfqqb1I+IHrPv9l25ty1VO2bWSyvFRkyVdUPpJL24rj2XHv3OunTnp1Jtul8a7somlw7RrPkK7HJLqfoM6vVDtiKCknrLoaqNqmEK0CTHE7gnBLgDiwJz2/ljS0niUFE1TDQrJJGoEY45VnH8TE9z/AKnW3U4jUp0xTptAHIDE/vqvRLLiJu3stHkUm+XTy6+nPGUjct10tsaOKzpIKkRhOVS5WOPBypCr+I/bsDnVZv8AubftwR55NwyLx7cYVEKE+mAF9/11FVYlR5tzblrXhpA5PJ/xyv7KufX/AE1XU3VV7lvEc8CpT0sWBFAO+Pv9z9/vrV4fQuHAVKp5bfvddqyjZBsWrTHIu3I6nkJ8tvPdT8b7kqsSVdzrJeQ9WcnP66+JTXeOoVDc6yFn7geIdEzZlmgvCoskSs7jCR4GHb2Gf4dFLaPw633dMC3F6aGOF4zJG/dsAe2FyQdbbWTEKOGmAhhtexXGtiXxL9Uh8DvL5x29AdXunud724DLX26nro4o/DWrhHnQe/Y+v5at8nRW9bNo6uvqKlYSsv7lJRgFMd+WfQfTQ9ludze6PbTCOCdyATxB9+59Rpn2/MhS7mnUEEQpy3biprtSyfssnkJY4y8jBn+37v6ff204q6evrqsTPVy0tJFGJDJGgDTP/dBBIAznPvjVNuMlHRVfzdhZhdF/8WI4Ufb7/wCunVn6iTV1M1juluMl08ZXVHkwnr3ZB2wPsNVXUCzIVWtaup+IZCmbbb4am3vbrVXy0qjKMWiDSNk92JznPr27fXSszWuztEk9Qrqk7RwiOLwlHl7sSBjJx3Pp99NJbj8w8s9QtPQPRlEkRO78SwBLegII/MjTjddV4Ntaht1vWb9onjzE/hhAy5GT3IGPT7e2hTCqQhtBJJU1Kw0XhU0XFnaeTCcfXyrgZz7Z9Ncnkjgkio6e5wT1PEyKYWV5IWAOQ3LOMj31H1VtuNLWxXNKeGohUiGJeTHkWU/i5Hu2c/bTO5U1P48VvqqakpVTDGZFLsSW8ykDA+3qRj31ITvKc4VjrrnXxy0yV9IJVpF5eLWuD4J9nyBgnHt7+mnNXWWqp+XoorrUVMsinkFXhHKre5x+EfyOdV6pq0uTR22x01vE1VGFglEjsXf2bGCOwz798fXXSKjrLVQTWuCskeWVkSYuqkJGcFuWe5BAJ+wHppYnJTEwpOM3yKN4J5BcKbizZCEup9Rywe49s/66rl4mNTLG6xCmmpwAqq/mRhgjH0GMacw32uoKGf8AZcqVlFShliB7JIMHKjt9s51WX3LHV1MMhqVqDLK6+VMcC3cry7An76aAd1K3e4VRCK2y+oFuvASzbhljpqsDik5PklI+v0OrZNtupp2NRQ08Uy8uQOe4U/iC+3fA1na4QtG/ixMQc5GDjGrftDq3uTbZigndamiU4aKQZ7fp6fpqDqeIIkLbbcAHxoxWqgVpmEcZVj3ZSuCp+mpyK3Shfw/01F7V6p7D3T4aVbR0FYPKVqDhSfosgx/I40QI7fSyxiSCVwh7grLyB/U509Oi0iGlWdQ3Q/3Zsa0bzsFZtrcVEKmhrU4yJniQR3VlPqrA4II9NBqfZHWjpru+1U2wKejl2LHJHBLRUaKZFiJAeSVX8xfJJ5oT2Hp661MtswO9QWwfdB/6aaVdDIhyDTso9zkH/XRhSczZQOl2Vie89KeoHWTdd4t+9NirapUqJVotyU9ClMiopIQSoTmoVlwQw8wP21omPacVnslo21TTLLb6GijoDFUR+Ks4RQFLKcqfQk5H5Y9dXC63ixWMxG73W3Ugmk8GMyzjDScS/A5x34KzY+gOntuhjusPz1r4T0zOypLBKsqNg4OGUn8vrp4dAgbKJY1wglUK22KHb45bbtNFRmQxmfjDErzEZyMqASvpjOMZ9u+u77fijoqejgtqBKOuNzSONGCw1AlL5DBvMGLucfc9sdgRzQFfLNROMAZzCSP5418NromJUxxAt3II46RB5tTdznDiqePmK6jrKeSIB08SIhckEY7Yz69jrJvXzZTXrcW2ahIvOiVERJA4gAq2T9hkn9NbfWyRwljTgANjPmJGst/FRRXe0bHnuFnpJHroak04SFSzBZfKxGPyH6aAGxVDhhJzdIBOVjXqnuWG83mOzW+Vv2fbF8CAD+Jv4mP3Jz/7GqUYJF83CQnVz2v0+v13u6NW26oghizJI8qFeR9lGfUk/wAtXat6WB4f92LI/wBCex1p6u7AAUA4HJCDkMgGQy8T/npxxByMdv8ALUzuvalZt2dPHgZfG5Iox64+n103sVguV3uFPa1hkieobipdCMe5OphwI1SoEgGVFSMY2CyLmN/f6aXjgxG4hRiI8FyBnjn66f7h2zdtsXM267RcZCgZcd0kX2ZT9Pr9Dr7Y77XbemqZKRIJ4K6mekq6aYExzRN/UMpwykdwR+epatQwmwRITmn2peqi1rdYRTzK3IrEso8ZlHqwj9SOx+/bWjPgz2psLf286ezdVUhqdvRbfuMiR1NQIoY3p5FnPJ+xVMGVjgj39s6HXSvqLtmy2SWw7kt1sqqf5edUiqYOEpqHRwkyVCgMpUlGCluIaMHBBI1VLpMlbYNyilqI1iSsgl5w9lkkeMiRQB/AzBj9O2qj9bwWuwj0nBhPPCIXxddRei27d7W+39FLJHT2+wp8q9fTRiGlqOOAop4wAeAA/Gccj3A9ztDpV0OtPxBfCJ06ot3y16LHa3Fsqop3Hy8kU0sIfw88JAOAHFh+RU99eVvABiSMYznXsx/Z2X9b78JlisNQ6lrDebpQnvkx5m8Zf0Im1GvbMfTDXclQvLalfx3o2yPVZnsnw89R9hXk7f3nd6hKSmlKUstvkzUV8Q9Fp8/8KP05SSY49wBnvqd+JnpzUbI+HulvCVhpCbnTU1LQUbsIaeFg5bLesrnA5O3r7Y1rP4jaEDpdd9xRSPFPthVu7cBkywQMGmiP1DRhiB/eC6zD8SW/7V1R6H2E7eEs9DPWktKYWQCRIWKoAwGSe57emNczTpOpcQawCGSCSNyfP9FxlSlXtbwMt6emlI1OG7jMw4xgDk3ZZz6PdZN27eqYrWrw3GnQBY4arJZAWAOHHf0J9c6PG1vjQ6U1dfcNob2krtt1NPNNb5Jpk8WmYglSeaZKg/8AMNA+Padrs0O3K61y0bVLV8cUscPJpikjKR4h9Bx9CPr31nnqNSVI6g7mZFJxd6sDHf8A8RtW7nhNhxO4I0w6DkY5/JV7js3wjtFXf3rC1w5jB3+qNfVPd1PW32KttlyprhTrTiL5mFhIjGN3VTyHplTq7fD/AGz9o7LuTo/iGa6TrHAMBI2VUcu7evEjtjVZ+E56Saxbupam3wyA00MLhwHV88z+EjGR9dHXp/aNo7WsRYW40QmkdiiRcVdu2WB/ID0PbH0Gp8Oi1c6yYMU4E9cSrvBaDLN9SxpCG0oE9ZE/BVa/7QubU1PVeJHNhPP4jM0Z7YXiPU9/bvqn3La9tponln/ZzTOQQol5yFx38iAds+2i+Lj89dqvwauknp6eYRUycGMZLKGBBC+Z174ycHGRr7tzbdCIaqru1upeXiypE6kc1BfjkoDkqSfqPXWkXEFdC1xCA1x27DQwmtqoBNNVAcHjUnJI/CB9R2yfTVKvO05baGrLhbWpWnfikDEM4P3x6Z1pfelmoo1hoKyGuE0JMSmnh48iRlUORj0A7DP56htz7RkWlpJbfbm+Xo3ZKyVowWRiAQTkkk4PpkHPp20jVPJSa+MLMT29vFFOsPdM4BGcL79tcgo6yqcHggQZHdc/Xto2S7ZsFWpanLStJOfHcDIcdu2fYd8k9++ndb09tFmjkEccdQiIxZEkJZiDgIFGSx/Ueh0xqlSL0DJNuV68a2OJo+ThWbPlOPse+pG1WOs+ceampXpQQD5R2JyMMDo2U+z6yKeha52eN4a7ApkhTk/P1ZMexH3/AC04FOm2KyoWqoaKEBZFjWZhJURFj5D5PYYx+uhmoSIKC8zhSXTuz1VVRw/MO0bxK8TI8pWWXJx298f9PbRQtMVtheoorfb6u5zQxRGGKEFYye45F/XuQRnPcjGqHYRZKGWC5Xu6cZBCBURp3VgwyFOPwk+vv399GLa1RahUK9paCKnaPjkRsHfsW5L3yq5BOCRkn01zd5ZaXagMLyntH2YaapqUxum1XtQ7nf52RJLPGUwsMkwZkk9A/Be+fUY9NL0m2trrOZpqG4zIsJmE0soBlkQhSqoD2yD2z9PTU7SwWrxEp5bRUwVJlbCxhucjFcrkAnAwT9R5tT9DFbKGxwo4p6CpCeFIHkbmqYz379nyTnuB76rMoyIKxaPCw1nduChLVt+hNnedaeSin7ZgnI8SIFcJ7++R6DvqBvew79CsdbUTU0scIZZIhUcEZQfMxIGSSOwGT30QKLc0dbcZzDb7fT2mjTjHOwClZB3AAOT3IJz39sDSG6K2y0G3KrcwuEj/ALNpGnJxyLyAErkH+Ek+mRnOcdtHbQDSti1svZAC3Kqu34qfet1pbEIltFBRMI5Ip2U+E4GGYkfT0H5nVL6l772bsyGuhq6ujkhCHgiZ8XOeI4gdjyx+mNDa2dVZaKgqoGmOal2kkKScS7nJPceg7nQ83ZT1G7aT5urWaBH8kEnAtybOMn7ff21btKArOaajIgkz1HIRyQezPBeJ3fHzxG7MU2yAOUHl8Dmd1Td9dQ6zdt1ElS4igj8sFOh8ka+2Pv8AU6tvTa526oVbbc4o4vMHWoH/ABA3t391+2qFuHphuSxCKvqablBK2AyebB+hx6Z19sU9ZTABhzp37MQPT8sa63R4BoXuttDSNQwtndK6iksl1gu1ZHFX0sCOrR4A7lSAzA+gBIOt8dLL/t2i2xRJUTU9JI8SeGGkzlOORgnvj115hbRun+wO34d2b0rs09SirbaIEGSsBHZ3H/yx69/1+87aest43nfhBaKmoo6aECOSfxio8PtkMPRQMZCr2x6+upUTO6NVo6XamiF6VdQF2puyw1MLNS1JWNuc5cBYUH4mZv7ox+p7Dv6Yp6pLDR1n+zOz0kKygCWoYBXYk/T2A9ceij1ye2nLdZrvPZo9s7ep+FJDhfEd+PzEo9HZj7D2UDCjv69wFt4dSt2TVNZbKijip55X8NqmNuTLHnBCY9AT/T+erRIawmcqApvcR4VJm4Q2yeWhtdSKj5cYqKn2VvcDP4jnTS7rG8UFykk8KvjIeDB8zfZtRFHba+mgjNNFIUYK78h3Vz6dvbGpqJJLk3G7hFSNSGYKFb8x99YV7XeBLNhuu+7NcGt6ru7u2/zHYaDsPM/uFeNlbvpd40MkV1hpHqqeLD+PnzkejH2HfHfP6d9KXE3O2tJHb7cqwwBZKiqeYGMDsxWMAdyPoBoF0F6Xb27eKFKmlMgLxyjKuoPcEfQgaMC1u47hXpVz1CSW1uEzMiMPHZzkRRg/iPEAeQYGPXUTJAI5rz3jtgOH3j6TdpVISWt3Hd6fwUmpqWgLq9QGKoydzlg3bt2yfpg6fXOaxRvHSz+HLNGVSOQKZEkbOQQoOCDkenb6ag6C+1Xz8It7i4yyAxTRIvhxhsEgFiPz7/pjvpzU326Sf/DaW0UsS+Miys8neQ8/VM5bj3I7Y76I6dljxKQrY7nV0y11xuUUDwlpqeKih8Egg8Q7SH8ORk8R6gZGvhv8Vnp6fFXbq9hBmZZnM6KWzmQkYBOB7knvnHbUXcrHGlfJLc2rqyO30+JlR+MWCewDMe2OwwQdQt+kutWhnttHFFSSpHMeyERgAhvYd+4JQenrpw3G6lpBMKUuG7bkrl5ONUcOVhTjHGAchQSB6kHJHf8AnoY3jcd2op2ZK6OWY/igWE+HEB3yG+vb09++lrluSWcJTU9P87Gy4xKhjQygAlgQfwgj2xqtXKsuDxcbjWRRCRi7LDGAqk9u2O/pj89SDRKM2meRhGaw3Wm3Rao6uBgZVHCZB/C49R/7+uu01B4RYcckfT20ANrdSqnYm5fmIo5ZqCQKlXECDzXP41z/ABDufuO2tM2ets+56FLnaZ45IqheaupHf/1+3qNOQWYPNXw3W2VUpYZo5Oa8lYd8g41Z9tdVN77RVY7ddGeBDkxS+ZCPy9NKVdlOSeOcj21EVNoeMEhNMWB0agnbNPZHLaXxK2qu4Uu6bZPTTcTiamAdCR9VJBH6Z1cn37s/c1JItm3RSMxwg7kMrMDxypAbHb1x21k5qAqCcEHPp9dfIEqaVxLTyNG4zgg6mGOAgH5ogrSZcE+21ctxjeEVD1E6e3jcNe1YzVEcFNJPDM6O3gTx8SEbirnAyPucHWjug3T7cu0I9wXe/UklB+37h83DbnKlqdAvEPIEPBZHGCwXIGAMnGdZrl39ua23ChommhaGUNh2j8/iD0BIP01brL1t3bT3EWqlrJ6aQxeJEUqXAYA4IwSR20Nr3tdoIUxUZsMErX3cMMM2exxpUPO3lYZ/MZ1nNOum9rXQTXG53VRT06c3lkjhbGPbBQEknAAHckgDXazfEZuXcMYejubQZmSFeVqg8zN/AMk5I7k/QD3yMnL9IlwIUS8AF3ILQrxchhqaMnGc8BoAdc4aaru8CwRBAIyHVeyyHkcuR+eAD9jqdm3xvSspTDX3Y1JBJUrEkS+vuqAZ+2dVO50tTcKh6utlaWaT8TN66npcShufqAjZDKayoFPGJe59hpjLYoz3KjHv20RJ7IQOy9tR01ofBAjP21FwIUYQ/r9m2e7U/wArdqCKpiByA49D9QfUHSlu6e7ctZMtttqRv/fJLNj6ZPfVuagKDmO2f66+IVjYBlwdAcUN2yHO/wDplTbysz288Y66HMlHM38D/wB0/wDK3of0PtrLVwtlbaa2otlxp2hqaWQxSxOO6MD6f+/Ua3qop5iPwfh9h3z7d/p66C3xKbBtT2aDeUMsdPc45FpeAHeuU+ij/nQAnJ7ccg+2no1Sx2nkUClV0v0lZsL4GS3Y9tWLabvUUl1oAUkR4o5jC/cOUft+ncj9dQdHZa+vR5I4sRxE+IRn90vqXb7fX37dtWvpDPSUG556q6xyPS00LeL4acsuDlBn0AJU/njVq4OmkTvC0mBurxbKvJti48RXSxRCKaSRE8NwwBQ9xgdwPUDPrjW0/wCzn62XPa+6b10irpU/Zdzha6UYI80VUoVJB91ZVQ/Yr99CSTp7Z7xQC/7Qj8eiq3YlEUqUlwM8kPcN6D3Hfto5fDH0D2rsW5f9s++d9UFPJSL4HyEE6tJC7jAhZR5mlY/wgdvQZOSObHaCm8OkGdgIzPRcHQ7V0ngucxw5AaTIPQ9I5k/oFrbqNuSx7js1t2Ff6hBFvS5x2l1aXw+UCjxZe/0PBF+/PGh78VW2bdtvYm0dvWakgjhprm8iUyjCsqwkHI+nm7/noX7xtN96vdRaSorCtutdol42yJSxdRyDF3PpzZgCcdgAB7Z0TupG1qm8UtpqrrXST1FLFJEXJOfMxb6n66q3t0yhSFU+/PyCzeKcXFvQdWc7JMx0QES/wQiGlg2/b0KsDkJkqfqM++gBvDYxa+3C6NTh5KqpkncnuSWYkn+utS1Owa75xXWI8Ce3IY76pu4OntyhldpnAVmJwUz31Qs+JMp1dQdBO6xOF9o7cVJDxJ3VV6EWVzQXG2WW3N85VusaxU8XJ3YKx7KO5PrrU2/NsbYsnSzYUF6s0kN4joJppZS5p5ypUZEg7dg59SMjOBqA+FDp3GvUOhqXqHhFFJ8wXibgzEKR2P66sPXu8xbs6vXWkSKGtt23WW0CkZg3jEDnKpY4K/vCcnkB5MeuNdFwyX97cHOo/ku54SW1KVW63L3fQABDZY3q6SGgobLO6uySR0ySEhG75JyAAi9x+Hv39tWSlqrMLnQ2+SuhimlheNaUqvA5ABXme6++Fz7e2mV5qgkUkdNTqyyeKg4ThQkHDkw925jkMcQSfrjOkquaaSkpIKegp6VXhYxmHiDmVRy4lu0fm7Hv+Ltq2ZOVpylKh5aS4cKOl5HxSsYlRmbAAJ4D0PIADJzjK41IXiptdCjXO5KXaZIYfAlnJkD9+LCLGAxHY5K9h9dRlLfrSgnWwx1hqpWljjqp1/c5AyGlkySBkDtyGTg49dOrXbqqkt6z3sRzioblMKKYTySsJOKrGG9hy/EvmGCM+h0+nqkfJVioobTdqhbbaII6Qgyy8ZEAUuF7I3JcDIORjl6A/fX2wGCymS326nVqxi7xK8zBVBI8THEcs8u5UY/P21Yaa4m0RTT1NOY6uuQlI3kzUcxlQAfXHFh3JH4icD01F22rlukE1ReJY7ZCuPljRoUqDhwrsH9GRzgYGSR/PUWtzhL1S1Jt691tat2qrpS08ULP4dAkBSNmx5Wy2MnPfGSdR122HbaSNbhWrHJNDP8AMJJAOMmMZAQY/eAN3+g9D21OXGvnauCQyGhJppCULM0i8iQHy3mKqBnAwe41XLvfr/WQRVdPePBhoEMMsSxF4pTyGZMMMEYx2Jz/AJ6jBnCUc0jS7foIsrT2uoqfn8O6zzDBCZYkYIySO4XJ/wCto2Ol2o6iuWSlKRyRCGleolTwjOMlckDkSQe4x2we+mlgpLjCy10l0pkjjTBLsxBKZI8NDhuWO2FAGD74GlKqqo7vQik2y8OaOoV3kkjYQntlsAnv6jzcu2D21B9LvBDlXr0W1mwUQLXu+6VF2mpLVao5DFFI1TVSuoCLGMKW75HmH8R/D7d9Jpu2qvl1paOqFPIET5hp6fylM9jGrHs4IbPZc/fVW4zQ2ihoYrxRxPHKtNUpThskZ8yiQjlyAYE8QR5j+WrRY4dt09VUUIt0Ei00Rn8CEgVEkQQoeZx5kPde7AYI9/TOdb6dguauuHaDLQpS/rC6fNWOthkipmMckdUA0ZXBA8Qjuc5KlmbP09NDfqzvFo+lVzp4aY0SP4dOGIYLN5skIGHlAHH3J++NXQ3Pa9VdDQW9omrKgLH8oxLpEMAl2ZSETyniRg9x9Tkj/wCJGjifZt2lEzRtSrSgUoIUcebKrgMebjBAyAAMflp6bCX6SmpUGue1jhusW37cdyLNT0rlIifbUrtrel2sNvZ5XWqWTyrG+T4Xp5x9NM1tJnn5yDKjvqcptuUMoj/eYP8AEMegzrXc5tJgA2C60U20WANwArT0q3/Swbkin3TT/tG2SSE1VPK7YkX747/y+mivD0i2rftyXWo27t2pWyrA1xNXHUlxSwlA49AAG/ErZJA7e47jDp3s633LckUaRvJBG/HAHeQk+n2Givv/AGZvXb1DT3K2Wu52iiqD4cEdWjCOoVh39fxDiQR29hrLuu0Fs1wtS7S4584XsfYvsRe8UoM4k6mNLp0tcQC6Ojdz6c0Gt82m5m8Q2SG4SNDTxCBRIxf5ZB7D7nPbHbU7YpwpWw2CBYmIDSFMDOPUf6k576hdyNWU880MB8aqyGqXx+HHr+X3+np9dVyv6iVVnpJ6G1QQwTzII3qF/wCIn14/Qn+mrtCrUq6W0efPorXEuHWtiK1XiA8TYAYJEn15R/haAfqVtCz22Oirrmauut6iJYYFyviepHLOc59TqtHdNVvHcS3uvSLg3HEMUYTOP7xH4j9z37azxaa+Xxi4Ygk8u/v30TdkXpY6hYamTA+p9tbOgEaCvPGXlSjUDwNlqrbpprpFTPNECoGCqjUhuDpPebnSSXDb1OZ4I1LSooBZRj1x64++qNsPdVJ4gpllAx6E9g3bRbbdcMFtaOGtMUgXKkHU2WtOkzS0K1ccYur+qa1V5lZS3Zt+utFyV6mJ0cN2LLjtosdMLzU1u31girqVaijdYwlVVcA0eSQF/iwC34U9dU7qlfHul3VK+4xsYUJBKcnI9lJ9hpbpFWr8teql7b85HSLDII1KhuRYheJPf19l76qV2DTjCxuLFz2h7zJPmD+/inbRxpQxXqaWuShm7R0qIq+EwBDM4A5ADj3B9/NnSs9qltdurWvHi0UcPCQMo8WXGQ2cLnl6r9iPfUTb71bIK6VjS1VbWzSvU1boCwURrnigOSHHowJ8wI7DGk74l6eWp536W325ijylXD1CLyHl5E9iAe2M4HbGguicbrFBc7yCitybvJg+ae7Vttp6sSJCjKDNOVQgkdsRqM/hPcg/bVMqdzxQU0Ty0UszSuQJJqxnlPYHDE/kOPbHfHfTqaba3KERUy1pVPDeWpLFYZMnEnmJIHofw/Y6qF8rqa5QRPKvzCM+PmYk8KMsBkgAdiDgdu320m9EdjYOUhcb3PEjVVXDFT4QKAmOCr/kDk/pqk3LcRngkY1B8ItnsMZJGfU9wM6eX66U1TH+7WNFCcURCAqDsAD9W+vrkH7ao1yhad8hlRHb8h6d8H6fTR6bRuVZaJSVZUBixTm2VznHbOe+jxtmvr9ixU8lKVlo7hSQztTzJ5XJQBsD2ORnP30AZfGCEJIx7EIcYH6DR8pZWuuwrHchJzeKlRSxHrgBSP5jUboAsCvUY3CNey96bK3TQRU1DVC31sQCSUlU+DnA/Cx9c/f+Z1YquxYyePr9tZHqIqmKqNRTyMjqc8kYgg/bRN2F1t3Jt+CO03eQV1EPwmbzcB9s91/THr3B0APLRO/3T1ANUbIo11h7FlX0+moWaiWI+ZOJHfV1sm+tjbooTVQ3GGmdfxI8gI/Rh/rjUjW7OjuVMKiikjmjcZV42DD+Y7aKx7XZaUIsIQf3LbFqbatUjrHLRyLOjN2HY98n21227aZbpXw3uCm5w0pK+MewAbAIB9yO2R99S+9tuXOwWutratHFHDC7zNjICAZOvvSDx6rb1yoJ45EMYjnhLr5WSRcAj69wD+uoPd4w/ootp6nqX3BtCt3NR0VBTxK9NHUeJVhpmjIUKQGBHYlclu+e4HY99WbZuwqawca2aM8aYNBbYmwTHEfWV8dvFk9SfYYA106ez3fc20LfdLvNJDPXRE1MNNEI42wxU8WOWKHGexGQfvq9RUchxy9uwA9tXAAXak5ECE2CKV9DjXb5XxF9PX07alEoW/u5yPfS4oyowFz9dSlMoF7aHIYg9vQD002qLRnvwAzq1fJe6j1+g9tdP2bybxCCSOw+g1BxG6eJVArbJyDYj/XUFXWdiCqqcnRYks7SE/uT3+mm/wDsoZWyYjj8tBfTDkxCCdXaq2jDVHcRoMsw9tPt7dIKep2pS3br/W1G3LRR1LVFJY4kUXe4MEI82e1OhzjuCfrg+XRfn2XRz00tLV0qywzoY5EYdmUjBGoLdnSyx33bdXaL0te9PVw/LGsnnkmmXthcSSEk4A7DOO2odxpMt3UG0ROqMrBO39vb43VVvsTaFlqJKiWeUQwKgjk4NybjLK2OwUEZbA+47aJnQf4WuqN3uMlbettvbrXWxxD5irqI0p2R/MGkdWJRMe+M5wowSNGLZnR67bNvUNTU9SkprXTIVarEZjmMRBBTLMFPlOCS2MfXWmejvVXpUJIuk+wIE3OkU0NLVJSsssVOWIbEkvozHh349sj2xoF027rzRowGkATznn+SoVri8t62oAGnAHnJkH6RHx3UpQfCJZx0uht+3/EWdZIpqq5TUnEV0Kcg9IIfWnps4by5LEKzHQuXZNJt64U1sptvWukioVdhLTviMliOUoA7M7BQvI9/XGvRaSanhtDStEiwpD3jU5ULjuusQ9VrHQLdR+wppHjiDRBCe48xOAfoM653i3Bxw+k2u1xMb/eeqwO1IpUWU6hmANgSB1mNv8Y2UPtujpHuInZQskbeUEev66v1/s5udDHIASR3GPXVC2vSNTyxCYPk92Ddjpbq31+2h0YhjtF0Se77iljR4bFRSKs8aOPJJUO3lgjPtyBcjuFI765yzFTidV1NoMfQfoF4k+pe8Yrvs7FpdPyHmTsB6qwQ2eP/ALtOgJAIGV76hr9sWPwmqqySOmiOMvVlYkx/jcgaynvv4q+uW8FNotF7t+z6eujbFPY0CyxoD251coaQue4JQqO3oNDL9m1O5Giu+9Km53qqq3btPVSVHJShIwZCfMeJ9vUe/bWmOAUaQBqVfkP1IWpbdhHUdNW5uIPRjZj4mPst9bV3/wBKOk9uq9wVW9rBW3yNGiobXb66Oqq6iYghECRk9s4JY9gAdBzadrrrhaqm7V9atzul8m+erXd+QExk5ycS+XXkSQeIByM9jkaDfT603K0wGPbdmWmlhlkiNZNTFzECoGOQHI9z3HYevftjRd2lQIl1pLRX3OGWcM0reJ+4hAdDzDcRgEvk8ifoewJ10ds6nQpto0thzK9RsC21t229OYHM7nzUjt2ousF2rKCoscS3OQvJPFLGFSIMQQWlOeTD09QAD7DtqYvKLGkNBVzxq1SCKOKKYFFbzAKFXC4yrLjJ7gYOQNNoII6aGlorjW1N2heGMUk0UI4xxZ/emLtwAAyp5ZbvjHvpmlYFmZ6e3UMEk4eni5q8jpCuSzKhBbOA2AvHOCc8hjVhpJOVr060hSlPBytjzx0NLSfvnl4zFkywXDBQwLgkZHZezKSMaZxbatNC9vYW+qMtLG05qWkZ5UlOPEwoOFPfvzY4yTjUZU3G1QmW0W2rqpIIlxK8Z4ly0Z85fl2Hb15ZJIyO7aYUG2bpKy01feqmK2VMKtITXFJVQKyqhZgFHIBgcAlsdvbRg5uwRtcZUtU37bJnAWJmqI1lqPl1IkLfu8Elu4UN5RxVclh27jSTLf4LSbc9PBYGaSNFnqWYzhZGw4AGTyC8Txyox3799R6y7bsl0loNtGa43usgUfLQQmDsrHkXfuzA5744j0PqNN6rxqajZ79UUFLKamR4aDvLI+EJBkUsASCwxyzknOnBjZTlPNs7boLrNUX283Wll+UBkpQZCuAwYBzy9WLDJU5A79j205mU1Nzfw7mgdmjKmBVUuCgMYZvUkx+gRR6H37ahrBdb1UrcHijhmQKslQ1UMyQqQVIXsRGfP2VQThsj66ma65SUddRz2+llgpZPFAdqWTxualQUCtmX2I5DAIcYIwdRnkAkpeKitFqttTc7hBHJdHaeOlTw2kaWVx2whPKRWUA+bAGG+hw2t9okp6uKut9KOSJEWlK+WB5P4lDYhQn8JXBxn1JxpSG3XC43WmqaOuRDDEzcMc2aRgVUeYlY89s8mJw2V75Gk46elhoKi2QVlVUQU1UHq4nkK8uP4h44PBM9+yZ9P5PhOF3q6ynttNWClp2lrbgWjijhWTjCrYDY4edxyIJIwO2PbGmlJZquplSvvkdbK1EhjrainkUKjKwHFUVvDVQpUhmJPmBx2zr7tuogray42ylp4Fp4GMqVMRMLORICMMSZH/F5lbGc5+h06qque4LUijrvD/ZrGQw0nAhlXtwZQQi+buC/ufqcGL2g4CDVpB+UiN2R5Edvp6aGrqZJI6qemlzUFg5U+cLzyThTxGBy/n26m0qXvZ1yoLmsdnmniIp6coOcsq9/NjJIx25H18vbt27U1bX0bW6otbGnoWM8lRcV4gNwiDKgZlyx744qBkE/TGgr1O6jVlBI9quKVFRPI7GneF8GVQ2RKwbLcu+OTY/LGNVnM0mQMrNqUi1wc0ZCEBqflXaNsgg4++vhvbKMBsY9TnTW71sU9zeNYpIS75CyEEkHv3I7Z799fFpYpK+CMR8KdFDTSsQAxz7auHxM1Lq7Kky80OOGmJPREnpzvf8AYd1oK2k8PxqCojqgJAWSR0YMFYe49iPvrTHW34rm6q7QobTftoUNLcKOMvTzU1Q3CGQ9iyof4cdsH3x7Zzk+6VlltCQx2ejUKsaueQ8/Ir75+oJP8tSe2KSsvcMlfcHZInBAk9T6HGBriLngzbur34JAJE5ImDImNwDnMr6o4fxvhtu22try3Dq1qP5bmkiBGdiJnoRnMqr7r3AlGshQ5llJYjPfB9zqjHjfCzRyrG479zjJ+mNO98TxQ1L0lMWMpGJmb1z9PtqoUtTLTTCQMwI75/667nhVr7PRAduvHu23HDxe/e/ZsqypDVW2YwVkbI4HqRjtqftF5aJwCxz/AO++mu1km3hXwWyeeGFZDw+YmbCRtjtybHue2ktz7XvO2LlLbq2KSKSN+A5Lg614adlwDnSiTYN6VyVUSLybHZSDqz3zqrcLWEEdQz1jfhiRs8R9T/XQupII9tWNLncapTcar/udKpBJUdi7fQfTTS3STyyfN1kjySv3JY+mna+Agl0BXWe/Vd0ZqytHGWTJbJ7nRS6E19JR/PVVbWeAJZIo0RYy7ykBmKKPQeg8x9Pb10DkqC+FUk51oTpHt3bsm3be9dUzi4NVTVASOQKq+GvJUYN+IkDIUYJzqlduBbEqncv1NhQtw3dH+y1qqa1/LGPEYlmm+XEz8MciMAggntgnkvrnGqdeqyovtTO0l7tUUNLCI5JY42SIMDyVAQD29wQn176t93s+36ClVaU+JWU0zv8A7/zqG/DkxxnIywY5Ge4+pxqKmsJrb6a6vtFNPlcx0zyp4JPFVZOKgHke7K2BkgnVTnCg2AhtxZI/98ppK6Ro0nUwpFCJAW4pyJPPBx74PvjTSvbwaAyXKdGCgkR+IshAOAA3f174wPb31aL7JFcK+QospLymNSnh+GpA4o8nrjynBUcQCQfvqnXisSORzI00cvDGGfnjiuCylfKPoO/odGDYRGmcBVm8TQSOWhp4qeIDH71Qg7DI4r9PodVdo4DMxLCUjsozxX174HrjUxdIqtogKt4yrsVVT+CNSM5U++cYGopo4qCNnCHmx7uR3OO/vorBhWWYwmFaoQcW4AEZwvrnP0/poodJbrFU2Ov28UJemk8ZFZ//AA39h+TZ/noXTVviyrFAp7nKsMfX0zp3tm8yba3BSXRM+ErGKpTPd4z+L+XY/pp6tMvZpVik7S5FSspJI5HjSItxzlR6/ppiad6qJnjgYwoCXY/hx7q33/Lt99Wa5tSKiXSnk8WFlEgKH8QPcY/P/XUfZqG+7or3tVhX5q4VVQkdNTUNIzTzuc8fxDAQHHLlgYHfWZUByCYARi4TMSl7LtfcN6o3tuzqKtr6ouBJDS08jlCRhXCqOXYZHPBUcvUa0RZ+iXWzptarPdd7bphsFNeUM9Fbqp83GSJSA3kXsSMq3E5PE+me2jx8M1ysvTtaU3k0tDWoTFWNHEytRXBQqSu0YAaoiJLZmYrAgHbOj/WS1PUWuq6W2W75yimeGorKZ+EtPCzhmjuVvqCmZXx4QIJEY4+Vc8s0O+FxTMOkzAEfv95UdRYZbhYKo9wdSqyne1XuxU1zo62SoohTV1LwmqAvqMDA7rn1I+xOoy27I6a9F9322o310/u9qmraVbjS2+tukkdNJEWYJIsTEhlDK2MnsR7eutAdaKCp2PfHl8ZJKtxFJcK148S3CWMHEkuBgOFx6YB79tZg+KPqI/Uel25djVpU1Fp8eh5r5WaGTDjIPfsyt/8AdrYpWN02l3tYxtj9VT9tGvS0I0nqp05qiJbdzp4GP7tE8J1UewHFvb8tPqXfe0p+0dbIAD3Y074H54B1g2x3ynprXdrbLR1VZVqFkoaOFDxnkPlLPJ6QogwWY9z2C9zkcbbN7slIm6N6blnppKiFXpKWmeQRsrZCY49iuQcAZzg5Prq01joGVaot70F7sAfvC31PvnbFPGJVrGlT0YpG44n6HI0/o937Qqo1lW/0Sk+qM/nX7EY15ybK3RcLK10t+67hPzSHwilVWSJIhzljHnK8iCO5IOAMHUntSPeF4hM21epNwWiSowRMZPHi9yp74Pb74P20ocCZ2QS8AZXodJuza0J8txE3fGY43I/y11oOoWxqhWzV1HjR93hFLIWA/lj+usbUG7b2l3p57wlznpZ4poIDHWEBZEwMuhbvgsOxXvk4PbVkrklnnRIHkZ5sjKueTHPr+edANYtMKBrRiFpqfrf00pK79nFqtqgjyq6xxZOM4wzFj/LVZqviSoF3PQbasW26SqqLmsny8ElQfGbw0LMRkqoGBjv2LYUEkgazxDY7NbL2dwPaIhclABqmB8TGMY79gce+M41UN1Wjb1sLb93VWVb0NVIlP+5iylbIv8BYeuMjsMAfrpOrOEBo3QzcODgNOEd7/wDFjLdlqaWgpYLPVZ4xQV0nyfMnBUcj3UEH3+o1Rd+dTfiHpqN41roKK2ijE1NNQU5qZ6VyodY5Q5YqO586KV759NBe+309XtwQWOwWcRzVhNP4rSZLBsAPN/CMAEZJ7A9z2A1ofYW8bNuOioYrBXCY2iko7bWZXjJHUQwrEwIPfB8MEMOxHv66p3FSvTdM4+233ysi8uLmhU068EE8sbRnzysb3reO7t01ckm69xXG5yhu/wA1Ozhfrhfwj9BrWP8AZu7vk291F3VSqvKCS109SF5YKsk/DkPb8MpGsx9Vbe9u6s7toGjORdqhkAU91Z+QIH5MNHv4Yek3Vrp11OoNzbj2tUWyz19qnEstRIqHw3QNGCgJYOWCEKwHbucatXd22la94HAOIkeaLxK7Yyz73UA4gEeexML1Dk6ueHB4ImJjmBQhW9P099DW4R01XXy1VNG7ysrGJMAqx9xnPrg6pyV9RIQ8DdicAe69u405N2goqN7jcp5IqSihkqah4z5khRSzcfvgHH565G/4i+9YKZK824/xU8QpilTMlUvrN1vPSq30VBtiliq933ftSkoHit8Bbi1W4PY4OVjU9iwJOQuDko1Et4u1ZVSSiurqoPVVlZPUGWWolc5ZnduzHA7+pw2PYasNTe5t0boue+twTv8APXdwWhVgyQRL3jhUEeXw0CYA7HJ75J01gNMlx+St1vjro5VnqAKU/vlHFuSlgM59fTGFVsg4zotrbi2p9zTHqep/xyVjhli3h9H2ak3O7j1P6Dkq5TJFzZaGmjqJ6RQWOWcQrlge/uPsPz7aue3LbPSxNPUU8lTK03FEdAoYFwAnHPlXzDzE9iw+uvlv2xudg01G8FLFVXCSjlpYEUrDGFx4rlCeRXOTkjy47+o1ebHtC47enarorXJebiKTETynxI0k5qeLgYjTureufVCQPUXm0QTlbrKGvdWvZ1wpqWKWaphiD/MmpnmanZlmLsy+GoVuAI4g+fPmXHvq1zVlDU296+2CkhqnYidbpRAzGnVly0OB4fbm5UEEjGMYw2q7tqxX+5RU1yvN1P8Au7S1DfKjwpklLlTG+R4fEFMkhuxIPm7jU2i0Mt5+ct0FttsscXatqZDL4ycCAniENknyheC9mz+EHRW0gzYIoo90fCpau3DcKWf5mk8aeqg4eBBlAV5gAMS37wqQW5FQPwe5BGoOGtr6O8xWKhoRLJ84ZVWSEySxRB28SRQMM6s7MclgV7nt3GnlHbaO0xx3u61b1rT08g+drVKOY+RbwQgJdiWJIYnA4smTkZZ1i1VxqTQbalkeSNYp6eBeVRHgAhmIVlEecuBzY5B74I0Rj4Vuk47J2kvylXSRvTRG4O1SyQiKNaYsoUyM8h/dIxwGGFbvjPc6iZb29VeaiV7jTxpUUOBG9STFM6FQx+Yf1LdwBGPsSGGpyShie100ReatnomZnXxB4vicQoTmWKQIwC91JyR657aYbm2y95p6WHx6L5c1aFZIS6fuljznxmHNvYsI1w2Cw4nOrIOFca6U6obTbaTwaq3qlDPPClMsTxhXLKA3hrGpDuSvryILAg48uoaz7JoLne3uldSNJDbGTAuD+IfC78xJFgIhOAysxIGB9dI10FMlPHXvW07TRB6dvEZp5PFAyJAiHmeRKfvCwGQPX01129bNx0VspaWOH5wrBLNUQGP5iVKs5YrL3EcQdWU5bljJI4jOHaIyUeVPQWa3QVkNTa62rpJZ61q6dKfPJsAHJmcKiLk+kecBW7Fc6bXvcc1su0VXVUcxnSikjgEaMuV4jkrqA0kjE4IDFVzxOTnOq0LzuGepjWltFRXRPURl5mrCsaoFfkkbP27OT3RWAC4OQc6Wte5qA0tTcb9bWp4TEIXljmFOk8oUcnLHLuqvyXHbicD0PaZ8WApBJVd2qFvctqutyqaKeoKTRutP4ixNImPD8ENxjbt6uTg/iwcHTJ6z/aCtuNpuU6UPhT4DxyGQ1IUgEeMPKFLggFRxPfHcEHo1RVbkop6W32xo6aaNo4nkfDy44ocRt3IKh0JfJGQDyyG1YKKILVGliQtWW2NIrcs6mSWCHvz8Rh2jbkCP73KM+jDu7mQnBhIo1nrONhtlukpj4igxRRyU3LEeWIEY5zEoSxAPoAcFcgLT7ohmt1Nt/cNq+SrahTDLGiAGNkYBXjiAwuTghpOw5fxeo+DbwobedzVspjpqLyVEtNUlYWfiQC8x80j4YdkGSACD6jTSitV0oIhJUxTUttwrrU1EpeKWJ+5aKEkkMC478mA74BGRqORgJAqvbp6i2Oy26SmpKmskjoE+VeoDvIzNzxgysR3z2JQd/T1A1mTeO6Rc2qI6KmEMQ5NIOZVQWPcnPmfv7986PO+6WjptyXGmgWUVMkOKqqqaaNnXsrIyQ5IiBHo49j3B1mbdyx09fUJDU4Zp3jcsMOzBj6N7d/YdtSNIVCodwHmQmJwqAQGV5I15l27AAnsB7DUrYLpTFZKi7MD8r/wYCciV/v8AbVYqJp5kip5leKnJDKrLxyPYkD17j10nUPPOYhB2Lg+UH0A9NM+i5zSyYBW3wK/HCrkVqrA8CSAdgeRPWDmNtlbjfZnqDPNOSOXn985/9/yA1Yrd1huO3Cy2ynp5ogpEQmBIQkeuP640JZKypibwJRgj8WD6nXeesyix5JPudFbYU3ATsukZ2ju6HiougzM85T6trpayplqaiRneVizMfUknJ/z03KciCuMYHt30jAxcgk9tSUUfP0AHbtnV0NDRAWO9/fTUcclT2xdzUdgqZIrjQfM0sykMFbi6NjAYH3wcdvfV83FuqPcVupqVoZJ3plAgqZO7hB/CxPdgPb3GhRSpCsqGcDgp8w+o1IV17qKifw6VmjgQBEVe3l99SDcqoXQIKUnaoevapkmMhQ8Rk5AX7fQam6CtMsfFW7g41BUpZiCTjv3z66umyNk3jeF3httnVObd5ZZnCRRJ/edvYdx/MaTyAJlBc4DdWDp5Y6fcu6aC23CqFJRPMizzcSxwT+FQO7M3oAPc603cq11dqO2WyKhno2Ms7yUJErGOMLHiPgSicGC57nB74GovbWwrVsWz2z5SjNUYJjHcqumkxU+MV/gRl8q4GR6dlJBYnTzc9TLUbap6HaVolmemkaokWCd5I4CF4yPPIO7OUbJCnnjB83tmud3jp5LMqkvdKFCXuyAybhSi8aGm8Q/IwoTEJEAdMggAsrY5Lk5UjUBfrzebqjw3BfkoslXVpVLEkB+CdgFU8so2CRnGpiW0rSVlTTW5ooKhBN4MNPxm8FY15o68Djk2WVyZD7g+mq9f1oZIKlLa1JSTTENMDMsxEJEbcu2E5ABiF83qAB76M1gBRR5Ju1wtlvhe32WLNTLGZEkL4bHIKTIB37A4OFGfX31Ra2gZZ4IDLLI0f70MQUKLyJCgfT1IORn21a7vaobQ0tRb66pdKmWWaauqB/xCvuAeIII7cAD79s6gJgaWCpmc1s88p/HJMrM7AqEVEJDcRkEHAA9Mep1JoyiNAGxVLuUT1cvGeVIcd8jtkZ7EZ+vbIJ7HUdPHTTQpLCUcBfOjjDc/bPfH6++pp7bdarC1yRBYclyuWdvN6g/5gen66hqnh8x8nDE/hIC3l9Sc/wCYOfp6asNwYVhgxCYVEMbSM85AAXkwX2yO36abyeHJCUiY8OWCMe3rj/366d1ahBxlhjpx4fmJBLN+X30yZoY0UZdY+2VZe7ff6amfJEiURtgX2tktElorYTNQ0xK002RmMHuYz7kd8g+3p6Y0VukfVBunm7rbc62kaos0NXG9fSxIqyVEAPmTn2PcfcaC2yrlb6S2TpVz+E3jMyqx7sMDJAH31KVO7LBGeJq8n7Kf/Z1zl46u+4IawEDylercC7P9n6nD6dzf1oe4SQXgfTdbMuHxQdJ5tzx3qCybhqJo5XjeqZYITV0fI8YZ05ESAISoB7dySDrQGy/7Rv4d9v7PnpaqxXvbcVAY6a30kVI9e9SzAknMK4QA4/GRnOB6Y1gPYfR5d829rnT77sMFOiF2aKVpiPt2AwfscEae7O6b7Uk6hVG37rfv2nYaERyVVXEnHxD35KiMcZB7cmyBnsDo3C6NahXDtIAd1x8BzA8lW41ZdmqfD3tspLwBDgXOO4no3I5lEPr58Sc/V+rrJtp2y83GIDxBFBH/AMEYIBk7FYzgkfiJ7nONZ0NDv24wVVVd6q22y308DSihM4kqJ2X8OeGcEd/xN9e3fR56unbtFGtt2LSLQ2iJPDiigc+fPqWPufqf5YGhDFTIhKcQoH4voR7jW7dVfFDzP0C86ZVYymWW9MNB3J8Tj8dh6ADzlUSz1dvmub2e6U5lpbuhpWcSsjRse6uGXuCCB2OR9QdSvURrvWWfb1DQy+LT7cjFDR0pbJWHzcUXPdzl3Yk5PmPt21WbhFPRXKZIcNLSTMylh2PEn0z+Q/nqX3KLtVCjulnKF6bk7Rs2MhgPQ59RgaDr0x0KC1ggpSO5buuqJJJtaCqqoF//ALjQogwOw8xC4P8APRCo6pKCmhi8Cnpj+Nkgx4Yc92x2GRn3x30NI7BfbjH+0N4XiWihI8kS1RapdsZ7KScDHfv7e3vp/FuuK4UhpLKZZFpOK+LWq2TgZwTjuSMd/wDrpOZMQoPZqVzl3Ca+7JR0r09MTC8lRXTr/wAGMdgBjuSSQAO+nu0Kbcw3Ct8o6S6XmmtQFwrlRJXEdNGcs7KqnigyMn0A9dDiqeuq4uZi+XefkxiTtxT29e/1HfXBEabctHf7duHcArlgJqB4hRTMRjiuO/h8cZU+vcA41TNJwcTOOkKTIDUZ7/cf2rapaqS4U8zVEgamrKcYLREHyuo7ZHpkYPrnVLstPboudJVVcs9HIeUqMGlCk+rhW7HuPT+vbTHbcDPBVGmr6dZKeIO0M1QiMVGMsqE+Ykkdh3wNcluRtVPLcrg/7uIGWTgOXp/17D9dSaIb4lWrVNElwgKJN16sU9VJTWm0UQHi8lktdLFgqPw5JGcY9yB99aH6HdFLh08tc983fTJHcd0LFUJTxlgsEIXkoJIwXJcscZA+p9hp002F1I6nbzpN+dKWtconmhaqoKipkjjgMagGSQNnih498ZUZx6EDRe6YdU909VrHJf8AcL96Krno46ZcstOEYAksfcsTgDAAXsPfWBx67r0LcAAAY1dQeQ/yvPu2fE722t6bKQaG4NUTJE+6BHmJnnCEfUSGmtHWzcrVMKO5pY5EZlBK5ijOQT6fTtrZdY0V4t9BWlmJmo6WTB/iDQof599Y/wCuFBInUOr3AjnFRQUyBGGM4QqT/wDjrV+zKl7x082pdYQWaos9GxOcgnwVH+h1kcQrzZ0KoO4j6LJ47duHCbK5B3ET6gfopi3wBpoIApDk8cKO2e/c/pqK6/Ui2/onuRVr/lnqRTUPjt2VopJg0iKf75VcDPb8X21cNtQQisSKaWXMnlDRqCeR9AAfTvqufF5dbPZuj8OyXuNC+4LtcKeZKSeSMSU8MXIvLKrHEaEkKC2CxbsDgkQ4XbuuHiqNgs/gNm7iFUXQEBuf8/oshQ2HblEILjWXaor3pxC0qU0giEsnIgMzfxkeXAC4wCrY9dE6GSxVVglpLBKjtUOHjp4YBHyLyjtJkmR1yXHEsPLIcN3wa/t6ptKUrvTy1bLFOZfm4ac00dPFGUPBXILlV7jsOQDZ8wJ1dbDbKW0QVNqrqdooPDIdZOcMZVyRwEaZafgEQOQACuCVGAR0jWALtmUScuT6mss1bEwettduMckimnt5hZEPF18MQop7eXzSMQVBBIIBOu9l2pdaSqqKWoeaCtakVYJCUaPzAOWYRkQAquAxHIESYypHZ1dNy0NsuFMWp7ZSpK4QrPAaWNPDjDqfCR2aoyspAd/4WwDntrqdw0tfcoKaex11BXTlZKOFCr1LVMRCrCISBHH5A4LkcmUhsHByX05q9TpEKy7YpaqGgpIJgaiot+JPGL5hgrABzVHaNUiiJ7cFRycAnkMnUbSXOvvR+ZrUNOjMaaXixAUBCkfqvNu3EtxATsuCh0vFQQX2spNx2+vuVUacSzOtQwlMZI8oL+WEeGj5wvLyliOJB0tU0lfRkyyXxRSwyecw1ZjFS4HI+JKMyllHJWxkmMggtjtMZwUfuw7ZRyER1VVYbnO70beI0jSZV6qVolUo9PyeRWPMD+HOAfMQMoy3ua2bcrIN1zS2S4TeNIKaORBIQvDylVj4oAe5LkgMuQAdUi67iF8rqeSy2aWkrklmaSqo5H8Lw0XEU0rMGlllHfiv8QUgryOpqusO2dvXKhqbvNX1VPPSiE05gLuWWQyrJFTevho2TmTsyMMEEEaYhrDKhoLSrba7jbrdanq4hdLvPFTRJwkcPLBUOgaTzEiKLz8eRxhc8lJ9NRdJRbk3feorzJTmlpGqpMg1vllhVX5KtTninmA7Ih4s2QAranqe92u60lSaOrqGqoD4b+NSCdCjQgQv4a+UkEqMvgspIJbGBXb5aLVUQxfsWrqKmteKSJ0oqnm0qvEhHiOB4cbdyQFGGQcSFYDU2yRJRW4SdPRUEUdZYYfFnkpKRpo7TUUjUMTyBldvGl5Zkk5PgxnsTxIOGxp/dNs7prqu1inu/g0EqxNNQumRG/Ji0awqcKq5IAbvliGwMHUHdL/Vmoq9opaHo5IIDLXxSVJlknaTghLzt6rhkAHLLZ48jxxpSgpruaC4Vtzt09vp6UPCsNA7U+JOCxmR5Bln4jJcAMWJPJBjIM0yMKwBhS16sNxNtqhaqurqZU4PTJBh5eQyHRZSoWmVlODglsBlPI41W5tm7onu1Ctwp7dUU9XXNNLOCtQywJgiNmcDJILDiqnIABHYHVg33U3WSe0WtVWm+bgFM5kRmhpgFPOpip1OOOEyWk+qkH6fKO43y3RTU1zAuFWvGOAPDmaHjkLH8vjjDzMZYE57EORjuG0Q2AiNEBJ3q1VdNY6yewUdFSrVNHW1VQivSqXBYRj+9I6KQuVIUjGcY0tZKO+pY0e6UVJRXFnhjpkiVpGmRlBLvHxPiSqCM8vxdz3OG1HQbhtl4u0luu09MtH8w8jSSRGOeN4wFMbzECMghiJFDHOOanscRt+qLteLoKG1S0VttNPxKVKMYRUwjKlmypeZUfiSowSBlQw9SNEz0TxCebhg2pd7nLS7kuN1lp7WV4r4jo8cgJdX4KeMMZUIxk7g8R6EspiLnebhfpaan6dXWeOhqJ/AmeFHjgR5AX804HLiGLEqvY5yn93Tmk6eWWyWtqm/3iouBaaWqiq44/8AdI2SRGyASskq9v3kTLgcua4xqMuNXtqO93WopTU1dNVU5lg4U/iMELl2WJc9/DALKzAsB3BYaQMJ9Kr/AFA2Q9PTVN1oWq1q5o0NxEKlKanVAvGMcsySt78WA7PkH1Az5u3bUFvRwLZXy1HiNyNQoiSJmOf3UfduOPTP0OO2th2WOqkuzbYvsMtTJVxPTmmgRqjnEh8SOCoUqFiOebE4DDykZGht1F2/DX1rNbrRLWRs7STvTTNJ4EwUAxTVBygfOO69go5D1OZskCeiIzBCys1PUySeFPC0ZjVUYjvK4I79z7d9NXpl8sXH8JOOP4ck9uR9/wBNW3cu35KS7fKxyKYZog7TRKwQOR/fPrkd+3bscZ1FCiFHKkfiwiMkhZGGYvEHsB9cDI0TTPNFcOijnthaN3amHhA8eXpHGc4XHbJB9c6iq2helnKD8JAIL9ifsNWU2+veWQLIsYlJcCTLFmHsFB7Yz/Js66T2GR25zeKDx5lVBd1wMnLe3cfy1NngOSoUXmm/J3VbjaWJijxkEDuCPTS0Ncwb/Iak6yCWmxGp5q0YZjE3kHfPnb3JB9AdLQCOWMTvFzllAyFgByvp+7Uevr3J9NWD1WiapIAUI9e7t5c4z37ae0Hz9WwSlpJZiMZ4KTqdpYbZAzQNT8JEKOCRmYsD6djhT6f+86fw1Lw1Hmq2dMnksQAjgJBADuPX0H8/tpAwMBCc9M/la23wrPVRhYk4lyDkYJ+oyAftohdPLzXV9JEaSritcFJL4jViqSyFSOJjABZpM8vMfbt37jVLtKQ1RlcLE0aEuslS5WnEnEkFl98ZyD7kAaum1Xp6SeKnqlSE1GUSYPieft6x4HlY9u/rn7HsCpLhCA9shajoN0CpskTVNFUzvcIJKmZGVHao5BSWmhY8UgwmQAOw7ZHbTO53i32yM0dFTL+zal0jghenkFPz7+KFh4kzcQVPIZ8odSMcTqhbBukdzuUMpqZ61WEsaUcLCBIwqhsTyMuWJCtjGGwD2bB0U6RE3RRvAZPmqym/eRVsEci01GcBG8Iq2O5VS3Yj145XsKfu7hVjjCBu5PnSadrnunxqinBk8N6YpFIiRnh4aY5cGGVKgD1PfOqxTT1NuZkp7XRW9I5JFgmrQTVPEFTkApy2QSvD07ADOnNRtjcdFHXbmCSzVMcbrEamoHJJ5OxBjB7kqGOCxUZBPqAaxcbVeKWijlus0sfjnxahmHGEA8cMO5Dd85x29PTUwepRWhStUzUqVMtHUVVRIhkZ3WTjEhIBXKjkVXGFwT6nuR7wNXS1E1MJYEpXpo5JHkdCytkFcoxB9V9fU6Xp6a73qtltHjGsp15xoqJxoyACz4/DyyACuB3I+2o+ojloYFp664o8AlKJGkfH8JBLrnAJJGG7EkA9tFBjARAM+aibtXQ0kToKiaopVdmVQCuST3Ye2O3fuc6gmdpqjjS07mMMmGcdgoPID6encd9T19qI7r4jLDI4jkLRKqdnjcdiMn3OewHbvqPkqoa+JoqEkOqkGMjBGB2UE+4PodFa6EQAkSE1npzPODUzR1EiEiNeJ8Mfce2Pt303NBBJWcS8ShmkSN5XzjiobHf09QARp3ay7lElPclllk45YnBH/UdtdQtLRTs0dI7IzBGhIPLuASGz3xnj3/TRAVMSd0lVx2+kiIFOqfMABmAJYMCCPXuMHIPpnGm1wtsUdS8VXKnEKEgIPcsTnsBnOB/LOnpCfLPUU0b8URPGkPrnJ7kep9sfbOmqSfMzwNPOvhAjyQrl8ciD5R2984z6aQIlO1x5rlNU3HblZHXWC4TUFU8pQ+C+SQMZDr6N3z2Oc6Juy+qllWV6Tc8y2evkPhmqiRnpJRgEcwMtCe/c+ZP8OhgaRWllekQoiFwqkgyAjGCfvgkg6V+REi/vlaVVLmU4CBeK9ivsSR7fnqDodHVGZVe1paDjotE1FTJcqJJUqoaummHKGeGQSxyZ9w4PfVeqKZomLKpGD/LQXsd1u1urOW16+eilkC81V8xPlcjkv4CO3qRkZxq+U3VurkdpL9tuGdGAkD25/CHErnsj5X0HcBh9tV6tIk9Uwg84XKOzUVy6jW6iu8LmhuMyQycTxIZgVHf/ABBf56s29NpwbfvE1rt8DJBGFMSMxJVSBjOf1/lqKt/UvpzJPBVxXeSgq43SRfmqZlEbAgg8hyX2+uixuD/Zzd1MLvZrpQ1lRL55TFUo5JPfHrnt/roLtQgOCM1giQstbphnsFZTJcameejmkLNEhw4TIyOR/pn6asF8r6qa6x7W2jXJEiLy8WjcMAOPqSM+mQTj19/XTrrPt+rtd9o6G50skbfs0Vq4IBMcrHgxOfQgZx64I0P0pUp+FelRJC4kC4p5cBSRkef11oU/dBKrEgGEVa+13yGxU16p6WC4UUVSaGonNXCkqyqqlj4XLnjzA5C8fbOdRNReKSG5rapoZ5SygSSJIOKcuwzk59vbVPtUtZa7o1aa2neVEZ2+Z84yxwx+pIP6n20hTPcqy/JVzNzPiCRikZ7BO/4fXA9/tpg0g5SDW9VaaYRjcaWZocU8R8WKR2Xk2R6emSMg+/1OvsVwG3txVdHumtqayhqo2ZFYjkvc+UA9s4/Q9vvqv11JVVt3ik/aa08wLA5THHzD2HfPfI1NWa22ynqTcbnLJUFSRJ4sgdy/Eg+Vj7eoz65AHfQ6haxupArPbTYXnMJ7Z+pG9emtPXnp3uavtNqvMbRTwxykZQHuje2RkHA9u2SNGP4YtzGydPg9bGXjrLlUsCf4m5DIP10Ar3NDWW9KucnK5UqfNIxXA7YGACO/f3B9O2rJtLqVu7Zdijs9uorTLTxeJURvVUYqCHlOcEk8Af4hkHGsq+sBxChoIEkiT6Lm+J8Fp8Ztix4EuI1HmQJjPOJwtTw7QtO5ep9nuNwo4q+xGIS1kNXJxihZORUs/YBAeJ82PvnVr6g/Et0e2C9XSWu50t4rIGeGks+3uLxRcQPKZiPDQD0AHI4B1i26bm6h9RBFS3XcN0q6SnRM08k3g0hLjI/djimHw2Bx9vXTaDbUnNbJWV4pp6gKYY1Q83AOUAT1bJYrj17Z9NVxwi0ZQZRuDqDeQx/n7KNTgdj7BR4fdHU2kZA67gA84yjTWfFt1e3lM1t2H8jtSOcqokoUE1ycOO0fjyEiPIz5lCHPbtrrs6glkt1UtTQ1lfdK2NKi4Vs5FS84LFo5GmlBCHJkjcjOc+YDHapbQ2zQ0mFr7UqO4R4qZozK7oFLPyRMYi5AYLEMucntopvXVVLX1FshtUFJSoBUNzjM86JxWTIEeUgkZYmw+OPc8u3LRnOa1ndUWhregShlNgt7ZoawdFZ9mWyq50NdNFRVc9LQR0lWKVVCxrNCyQwM7klhwBR0C9jgofTMzbJb9TwpZaepp7NCiCopY5E4zGEsBC0chAkcI68GHESKD6kZ06WQU9EVoUq4mWRkgp3SGaqalYEshlBWKnQq6SBQSCw8pUsNMKaTdU9yrDFt2hWvucopHq2qyzQxRomWeo7pJ4/H8C4ZWdfU99QDVNjIym3+y9spo660xQVEdTRRRSLW3lkUPE55I5XuXXxIxGSowwbzAd9OXuVLDS00m8Wo62NpzW08PyapNBlDgogk8qxyF1w7FSjqykHI11o71UjccktlpKq4hnjDVLp4NGjxzNlzPJmWRSwUuQPKcDhjvps0FfWzQ3m8UlEppIWmp5quFKOjpeJZXLtkmX8HF0QFPMGIXvqbRBhHa2d13j3xXhXtlqsy0NJNUmkp4ajFVPNErKwdEyI/FReTKCOZQ5y+CC5g3PH+0Y6K1UK1UVJDJNUM0/7+Ex/8NmkwY1yG5LImQYwUYL207q7vboWNXdoKN6URrIqxxijp4WReSRqvIvI2PRD6rkq5BA02s1qsm6LXBTG3+JCZ2YQLA0cjNIc+DTxko0gCsksYcBgAwJYeXRN99kUNgKKivl/27Q8rDbIrg0zrHWTWyLglNHLJyjTxQeLvycBGYA+ykYwVdqWeOeohul/3FUNVM4eGiU4jVAiyMvIDmzeVmBIUqYypySRqwy32ltdPPS1XylZV00McFOzQ/LGZv4eESAjDKkf7z0U+Up6sa4qXTddzo49u2FacPDVT1Mru1fFHTsXPgMM8Fjk4ZTAOGQ4IB1IwBsn0Eq3Rbc2/T/PXCa+xcLzJ40VVIFhjRXjyPlkQ85Iw6IwHErzBBUEZ1B0dGKG42u81NzltqJAlVN41OSuFKAlYEY4i7OULABX7hvTUf+wUudztEl7uyzrRTv4X7NjMQUN5gZJ2bjDLhCF9JOasCGB0pLRUshqK6O/1tVBGJVloqd2mX5coxyZOJZoWCuXwSsbA4jOM6hBcogBSNXHuC67klktVgq6q4Q+BTVEzPmR4WY8RBGQRCvJeQz6F2DK3ZtTVvtNTFX0ph5RXS6EyTNFEZ6ln4kYEs7GNMgsUwWA4lcg+XVWSsu91uEm2bLU0ENpt1IlXc5KZvDhkLMQgZyRJKuURuIZV5d0Ycguld3VAlv8AVXKps9spLbSjMtdcecKvNx80lLTo/LKOQvfz5PJuYPYoAaMlGiVI3a70FBRXe4WSknqo68titpGlZGy+Ec1UuHccnwoTGGDIcg94Srqp9z07xxVdVTC1QKYvkkaKnqFIUMY5H88nFnGPUA+UqAezrcpnmpqenuVHWUtrrmFPOayk8ImowHJhgUDmFEeJOClTnlj6TFvviwW2OlVaOKtgiZo6urLNJTREBg8NGxY8gjLw8QhWGCCrZXUgXPynEKu3Sx1O7aKS2zWkUMssdHJLU1MRp4aWRFHmSJe5csz+ccsF8FiDgRhoa+jq6q42uooq+6PQR0UFXcY/+8pzEQmjhYjwnT0K4BAx5WB1dqi81FiSOeKSquNRPJxhrJoVq6klxhFcAhQuAeJbi5QlfMe2qWl0/Z1I0M94tHjyiZ1ore5DugZsrK7Dkg83EsFJBQBgDltMMGAiRhWXbVyuu27QJ7iHqK9KL55q+ppWnkgjXPkSNSUgw3IFsAYZWIHfSNrudHQWZzRT0FHNVyGeWGbMtyeRm5q0kjECLk7K2FI4xsQrkAjUTbdyT1dviseyduyTwJR/M1KxyJAgUDLK9ZIcv5WI55VmUleQPbS11i25LQQJa2tdfVW6gWsmp44pKeClBKBvCYr407jKqFJBJyAxyQZ533SAhS9BSXKlt8e6LvZIaGsE6ipp4asi3xTKAfFqJVI8QnGTw75RSFIOdQ15oaH9hmC5D5qnqaoT06mFIaSCo4lsYVgsieIfcHykkcMEa62q7QXdqmnaL5eOCsijlasib5ejljAIVITGGikZcFRxPFcqwK+bX2motq3atkutJuB6aorK+sjTxpnPzs47M4jUOMB2UZXkAFXHEAgoicqWUJN27M5z09Zc6loIJwXEVxofBaLszBI4kb2GSVyTx7gnuNCS9bYNnm8KuiqKiqeZQreGVkZD3LLEeyAdgGPZgVxjWhtx7Q3Il6tdWaiuppZlNVQo7CSeOEYIknbJVO78hxI4hW83YgRDbAsu4Wr77TyVNxVKdqHwIalisDY4s8syjkEBDNwPccVKhhnRKZjCm15QPqA9IZIjFJHOo5GCIjkR2/Ge+Djucd8EYz6aQoapF5UM9Q0kMLFooGlxAqlcjL9ie/t9fT6ast62y73Omo6FX4XGPjTxeF4cNRISFYM2TzX1AIOSe4A96tWW63yVZSOvRhSkRByQi+KMHmF9XIxjPoSM5zou/JOWA4CYz0FwlQRVghpaQnMBK4QKe/FR79u49dN7fLU01Qamkgk+amdvCldeMjEAc1UD0B9e+P0zqfen/btrpZq6ZKVuUsZkYHxZCPdE+/oPrgj1xptUBLZE9to3Bq2de78Xq5CU9TnPFMZU+49CARozXGEdhxCgYKb5G4F5TDJhTKFMxYMT3GXHvj+unEi1UVSjTrBJTO4Bp+QSNZO59iM4zn6d8amKiKitqOkxaaWNxyhgRfDb08zt6fxensft319S0y3UidamOJJUOFnULGxRgEwTnl2P9V9tIk81IE80vSUhipIppZRDTwgszzIzENkgGNAO4+nb2B9tW7b1NbXvVI8sDV0MjIHVu885PdQFPZB6/QHPqO2qpFbrlcvCNuqZEWjxD4zh3aTt5VRPxHPm7AezeuNErpVaaGmuNXHSTTCRKdDUNzL1LIT3KJggKh/jHm/CQM5BC90BCfgK47C25T0Ju1U1LFUT0Uhne3wwyM8YDZIWbJRyAVPIrjJIIUkHV9o75bJ5KtvBjljp4IhDJRFWt9LOjKCFRjykJQnkuCSwAIGM6r+wai13W+TPS275qJqclqaNuUcURbCNLMCDJyIkJUj+8ufwrrlLZqPb0kpttrqLo1K0tQjx0wSClR2PHwgCebAjiOJAOD39V0IkKtJmVRqq2x3ahZqmeskiKRPCVCSSIgwPDYkqFKEemM/c+uqfeoVlq4UuFdVyBFIiolkFQwlMeSWY4RUb0UDJznv9Xa1VPXVldcpZrpLJM5dfEjCIzFD+8d3BCpIAQFB5ZXtn00olHX1tRV3KntcQpqN0WSskjaSWZSn/AAI3cZ5ADykpnPppEAGAjN3S622ehppJqO2yUjtGS7zMOTHw0HBSwx4ijthV7LnBI1B1pNC8kzV9Oi+LG81QylpGbvh/P5gAT3A9c+nbTupvF9muCJVXn9kwSyRosr5WeRfDI5IO7sVGQT2Ge/bTK6W4W+hU3MTVwSSOfxpxheTnOSqnLAjH3HuNODpgKTZCrT3eZqmVTVLmMvKsgQlERsDCgDPmA/rjUcIKzki0y/JxTiNeKpxaRA30GSW986nXtdNPRzGKB08OnkZIIxg8kOTkIcsw5ZH2z9NJNTLQwQ0kqeNPFFmQJHwCxshKPgHJOD5j7aO1wA2U9sKvz1MlPJKaijk8JIwvmGMSK2C+F9gO2D3PfPrptcxO9OEgledpZHZgHHmB74Cjufbtk4xqXqkjLxQVpjjQhWaFCTzZoiSCVJOCcY75+o0xrahgwFPQgGPMStnIXAwwPH0GD9cnt66lJKLATON1akEK8pojxVYgMkl8nuAB5hgjB9jqNNTUzxPKPEkAIZYwhVVHYMe33wDqxRxNNDHUslRLiRJBUKhKSIhPORV9BhcDGPtpKpoqt6Pw4Y/FRW4+cFm8MtzDBV7cT29c407cGCmlsqvQSKZKhXKROyl8MCVU+hHbtn6H07aepD85HJJLUO4mCSAsPDCgHDMo9AR2Hf767zxPbIWphQxSSQrLEzOokIJIPEgdu3tjOnNCtRVPJLHBJLCQwzIBJ3ABwirgAg5J/P0056qUjYJCmpqqON4KeNSi8ldowWUDsPUeXBznPfvpxUfuKIR3BY6gU3GJwreYrkFFyPKMLnBGfp76VkarLvJ80pkaZWEQbKHkpHfj2UHGCPbUdcqSapqlhDvMxfgo/EyJjsGx2C5IGSc6bmm3KZ1608dc0xWOQlSr8U7MxGcgnsDnsQPp99KNRQrP89HCA8cYdRGeQBbAVSx9e30GRp2lCHqJHmjLpE7vFBFyZlZGAbPsGCr2PuNSPEwVhjpI3XBaaNo1DcAAXEgPouOwYfcdtS1SQnkt2TGW3NTyxR1qOTKgbODzIJyCZCMAg9sgdx766UENGghnDSQRKWjWX0ZZWBAwT7ZGTgdsgjT6WVayilggc5fsPGJYKoIK4duwXlkAD05a41urLm4kLrLlR4s0iABZscipJwAwAHp6j66XqokkBR1THSrMtL80WIPmQghVHHzEsfMVBXIPtnSa1UHjktC0s+ePGL92qnjgnt3J98+h07n+ZyDchLFIGmpyYSpM8nEhsMMjIBGR6Htj00+oLNX1cdHT2qAr87COEUEBEjOvlkBYrll49zxBxkY76hqAGUtQYMqLoaK5T1kNF8qVeZvBiiCeaSQkZXA8xyMdiffVtqrJFRVElRcyywLTx8pQnKMShuSoyg+VMKwIbLKRnU1S7PqqKx1N6aFYahoY5EjlmChqQzhVdXcZlGR+JSpA9dQFU11ainqUmkkoayYwQwyOEEbhWZUkJOeQ74Pvy9zqg97rp8MOAsd9Q31XTSPhGCom4uVrB4DFmdmQtMAxVeWYyFHYMQcZyQRp3U0VO84garqEenAV84wgbPD/AJUPLIIPp29tOLfa4Hq2tsRkSjniecvKFjKRrgyMrHJBBVlCHPqNWL9lWCSvk23b7dULJJUskx4eKGYcww+XHmYhSp4gghuRHbRKjtA0BHq1BSApt3XyjsUVVE1ZBVmCAUpkeOKPLxKAY5B3PDiOx4+vZiMdtWrY+0qmurZL/b6ECNJBHFJUD5iARoqqyefzyFiVKcPMBkY9NPbHaq26/s+qmQzyxulLRVEpHASrGCitThTyRlJXJXPLt7HV7XaymWC7XCur5UmDGI+MviUaKo8BmjiHFEik5AuzKwyoIyMig6dlnwSEzuVvtCUEUcyT3HwatKGkhhpzFH47JkFzgPMhjLKvEAscc+y6vXhw26istHwq7XSTV8f7KqLjTmGKpmaNDC5hiPJiuCq8gVZQc49NQ1sj3LV3ShentVZTT22crJN4sYqYZCzHnLUkGOnMbOAOI8wbuQQCXFHsWjqNyioum54a+4U80jLb6esWao5NIzPCGkLRplSWC5KsTlWX01FjeRTMpimYKd7jpZ7NOty3Hd6dI4rmsaGSBIlSlMhLwLRliOUcq8ikx4cQO3fGpOa0yVlBT0d5uFetLXePSzU9CFEiqS7qIqUDlwZcGNGwycTxbDdo66bjstLbqijukzU88UsvzdNQpEyTxvEcSSyFuTLIeKvEGBWQsARgcm22dxXS9W+2z/tWa0UFPM1LHb4Q1PT8IsMYkqCrSNJG7HKEArHzIbudF0HAJR4gSFMXyoa+tNYqCVpLza2K1EEpSrq6l/CyyrxYpGsirzEi+fmSDnTiWptlHfJ2a4v82tDDVPGc1zzRLhlkwP3SnsytIvmw5LLqsVlzjt95kpv2R4K17EXCmE3y8cc48gaSQ+ZkSUiUSqxK4KnscakqWxPDZqm93SsmqP2PL8zUrLzNNLUBPDMSMx5IDyLrIjFH+nLC6np/EphoCcQeNHeJzt6kp4obc9PNU0VJUBpDG85yHqnTw6cKkinIyrLnsMYD+kYVU9PQ0FrSGGaKSmlSnYxiMR8G5NPKBz5SKXVVJ8rMyHykaRjoVs9FT2fadzgppLJWiruNzuVQYo1klXxY0ETEfjwInJzG3l/CWB1WJ9vVVpokqajc1VWWy61dA1ItWskKqrRmVFWIdpOLsw4cvwFuLHJAlpIAJUgBsvl/q9oU1TV1+7KlL6aaZZ46KgdoYDLgsoaoTDSTAL+JTyIDBl7662msve47LKm2rK1LbKrxKiOeZWoqLi+XdIpVYHLkpxZF4fiDKGJy/np0tG2oLReqGagoYw1NHUzRMOMiTcjAiKGMsiHDRSuFYAHJII1L0e6blYrZUXeqCXC7VDJJQXVYlimk5rjlTxoPKpdGKyIoILedcHSaSpGF0q6aGS02FapbnUQUcNNJHbmgWKmqux4xsj/vZT2Y8y3DkQykYC6V3BRyVNvo6qmraO2EVUL08NxBRY/M4Efgxd5DmRIuTfvI+xHlOndymuNqVro8kcT3GnjlFXc6sS1McOMvyjjBRIpHPhhWGFkU9uL9qfu2jtlRdaqquV8ksNWlPTRxx10aCqnZkiEAZQzMQ/GQuWITBXC5wdLTOUxbJlS2275teiRqmx087V1LUySVNyvFGhWORmOAqRkkcRyDqQQ4KM3HGT1tU9ukq/mqdY6m6xUTPJJVxyS3Coj7MskcHnQxMnFSM8ckcChUHUVcKX/Z++R2k7eNjoKipEqTeE0lzp4ImKS+NH3KsQxAHYPGPQ6mZ91RxwG0bBt8FTJUTvUURoGjiqY1diqI83HHHmX48E4ujYcD2jGsYT4ATmtNzloa6mpP2oLldEWnVJCHuUS8xxhBPlpx7qxCsQxUt7al6NLfPXeBVXF/n65Q8tJQyiSvmkhA4PLMfLG5KOoCjmHHE8gdQm0K+5tdau2UlZFVT2y3TzVNFRyeGspZFSZpqiT8XPih7EhGC9gO+ulJuK2pc2p90z0ElLSNJ4RjKUtLEzKWmikmOZCWcNmP8IYAgr5TogiJ3TjJUvLcrbuayzJca2GC30bLHHS0tcIYeaTFiJpQGPih1BZcjwyeYGCRoe7grtrC0yUi2pKeell+fl4yxRU8bl8lWcE+LGcHkgcpzOQUIGvtO9Bfoa26VFPHUWu4VELxxmAW+nEhQxsYYPWeRRKob1ZlIcH01I19uttmsEtopb1R18VLKVhuxp4CwUMxkEUanxJ2OePifiwoUqSDqWkk4UsBP7ZdqLeVvp82y1wpaIo2lpa2MQW22pKSXZUciSRzwT18xwSrEcgVrldrdaxVbjoZYJZC0aw11xeT5jjM/lCRquMoR3EeOcfcx9iB9TYe3LiaJGr6mCKrCyz1VYplqKiN0LMsacuaxoGJGAw/hZAyklzHsm32m8JcIL0KumNvlop5a2BKx6qJZCUKQqMQoYwRyA4h/TgGI0gBzUz5KLqrfWRRUNwqWarhvMayVZhrGNVND4kiu0PFiI2jB4jOQe4dR6BzTbPodu1BvUMstIKWjmk/3OUVlUwCcXZ2fKjhxSRWB5qWYc/KAe11qKPb1MlqWGtt1LXK9M0EEcbXSWNypedmOVhPnRiJMN6gSdhpCruVfbZZNg7Wo6nMUKM5WdWkqJggHKVgME8GLMCyuUz52HHLiXYCbzTXbc8d5rfl6edaaC58o4qQ1akvNAcGeplYhDlgY+JKvxZQGJ7F9NW7eprVUW+eht89VSyyQU8cTmlo5aYIrx4OFaRwCTIOzDGVDAkGLstlsN3mt0/7K+YFD4nii31Aenp+XdWaTkrTSO3t2OOIZZO+qxvW5puq5ihlnh/Z9r8R1gp6V0jkZe0vCMZKOufYcQQeS4JOnb4TkJ4kpHfVgbeUdu3FPVlKhouAJplNDTNn1hSMESR9kJIywLE8ABqFh6dtb7dDWXpaK31MHhzxy10qO58UMHWOEd5iWAXjkHt6KwHK/U8/yElM23bTHDHTeHOtZXQtFMUD/vjAn8afxOsRYLlcdsjTmyWu9G1Vj7zq6WggpJmZ6+tkWWqmgyrIFTJIXijtGzFlJHZo2ByjLeaeTsgVeNufs2SttddFPQ1UMgCh1LS1ySdiwJI4hzjHpnt3BGq820b2tdURUO3qlJYys8jRODhXyD4kh7qwwQckd/UH11p9qvbt1p6gQV9Db5r1V8JZoqZBU18FSzgZeQ5WMqgJJ7srYBLAZaXvba3i3UeyrCnylxjc+DZadooauohKuviySMh5EKAT6A8QrIW76k17pSDywrO1LsiqoYZIayljqWDPUVFIjcVgIjHrnuSo7lR37emNSO39tV9RtyrqvkjV/JQIZGYhIfCfGQpJ/EFGQiklvbuNFq12OnutXBSxU9Hcqe1iOmmqKZZaKmo5QS0rTOyktJxJAwPKcDiQTiOulVFPX0lktcK0IilWFppSny0RZirCJeP74MUDAcfLnKhO4MjUxkIgqkqk2azGgo4KuGtampqrnDFXGEvUFgGCpEjEcs9ypB9V9QfW37DSyUsqGGhulLM5AuchbFSVflzVvDOREzFDybjxyQ3sdWltux2eeot9PWVMlqNOoasre9TO+VXEKkDAVWHB+BBwpwpBOrZSW+6WmjFBb2nFM0rS09RwVa6rQxk/MSMVJdfIY2LZ7nDFcg6gHEjzUHO1bqHlhqNiftV6S0U6UcdOtVLSwq3hRs0hVRyz5fTOQArZU8cYOpSVbRSzW/ds00VzqqqjRHqjVzUdLCAzgwhTkF88SCB2OT6AHUbZ5KWrvl3tlx29Ksx8N4rO8vzKIyLliWOAgDtlSTyUsOXiA6lSKe5SptdLt4zmCQGlTjT0cRQ4LL7c8jPFR2OfJ76HhpjdRyDnZBBqKK2U+ZpZc58GGVqrm8UWcjAGScZYhT/ePppC5Gumq2lFSIOVXJS00gVqQcuAKmRiTIQPT0+pzrmuacuJyixBCaJbZZjTXIyRSNIU+Q8KP5WOSMjhKkTYZnYE9v76kt3PbUXc7DdOLComFLFiWAokx5SRK3d+wJ5jsOJC9hrmuanMQpcvRdamytDTy0MEs08FI8vi4RkmVSnaTgp5DkSCe7DB7+mkY7PT0VFcJqkCk8KIMkNQrMUmMOFUqmWPIk4OeJOO2BrmuacOO6TTJhRAooqWCSpqEzKHiDR1CqgZQjc1WNfVlbIyDnvk6a1DUHhxQSV8cvKIyDxD4fhopAQkerOBnyn1wMeuua5oh3U25TOaheSmoJJaerhWqkkSGNpCgmgP4WVP7vL19QT6+mvtzjE1wkslHUy0yRuR4XgcCGJ7JgebBz2yca5rmpSVIGCmlLY4nKU3imZmqlSOlmPElshO4HcyZGAB2wR30tR//D6eSOngDPCzSIssnrKj4PGMdyQAQc+oHvnXNc0+ondOXEld4KR6OKqSpkp0lRWkaN4gy8VYNlQv/hsGBJPvkDGlHFFDNCvziDMLDCkuMZGUKoPUnJU/bvrmuakRiVAEkhJ1y1FSgSmhkdPFKyALxlIY47RjsGX6kj1H10nIZHnqKWqFRTmOpjllppIS80skXlcFcBVPHBCHAPfv765rmpMTgpK1Ud1+ehltbE1pl8SGKM5wSS3JUxjtjLKPTA7dtKUEVZQRxR0PhvJVVIiWR258CSMBj+HHI9m9V9Nc1zUHOIMBIuJCk7VtK8VlVNQ1VQgk4vUGkjwwWTxRHhyMLH9VkzjHY40UNsbVO1dvuLjW0tMaNkqJ6mALPUcFfKL4jkLTSsVYqByDgntnAPNc1iXtd5qilOCuc4ndVDWFCfDj8v1UJUCl3bdVp6OlqJbdWMtBTLTRNOYjGOZkjlfycmbmWQAdzjGm9BtSsvNzqaaELUVPyrPTQ08omljo/DDM7n8AROWDgc174Hl1zXNaDv5NNwZyWk4+zUT3eICs1ls+3Nv1SUNvqovn5IGWWClSSeVizFX8aVgVKOmWWRRjEee+dWWz7XtG3qesqa6oaqlpXglqJIpPBaLDcYQ8rDsW4YWWM98gEHOua5qm9sO3VQDGo5Kb2G/1VdHV0W2aanp/3aR1Va0Zt6QjmWgkkJ5E4YHLhQOTZyAdWKOnkekqqnc1dW36eIP87HbTJFSK0jZlLyqSZwGZTwywdWBXHddc1zTu8EAIpEFOZH3NuSoq2obTVNRRUs0YeaL5Cjin4JxjjYFPEEyJAjRnDAqTg4OrRZ7NwvNwsSxVKVlJbKl6uK40gpI6cLLG3FZfLM7wS+Xwzgsoyp7jPNc0h44BUd2yq389QW6vqo5tu0c8s6VC1VRU5+VkoZQXqoYgR4k6BiJUJfkF7juMB3XW5r/S2wRvU2i2UIgUVU8Lqsp4okVRHFGfKJlRuE+OWRh1BznmuaKXSpsJhI3TadLt23y3aqW41UiOJo6u4zwUvzLyBBRTRxgPl1f8T/gkGS2cdn9daN0zyC42/ctLSUtHJHVmStXFXBVoxd4YoF8iYBzhsQyDiwCtnXNc07zBgdERviGV2qkt9tjv0t3mNXcXTNxrp0IqJ1lYmFFp2Vkh8Xgi+cMikEr2Y4i7baZbzuFaCrmmorVDTowqHQz1hmjJ48IcAoIWYiWDAPAlk9dc1zRWNET1TDEp3cMUzQ1bVVREqr8pTu1QaqpndcxOVfsYhHK3JQSSoKg8h3E0q0+3bheV3BXy25ayVpkqbcFq6uUoQxSNcYpy5CzowBIKOOWMjXNc0LUdRREx3JDUz3inqZ70aeqSrZrdZaaQvWOZ4SQzyuSqeKjAsSXjLsAQCTqm3aG73Sn+bqYmpplYJU01FwxTBHMbR1D1AwkhC4MAcqw7qcLjXNc1MiAE6s1VUUt1sFBt2musU8VQopjDayfnHkVhySRpMMskTYdYnJUgsqODjTinotnWuQWW5UCw0ppPHaKjmVVV2weEtQ45tKHLOjJ+9jIKnkBrmuagQAYCaFB266G6bovE0VFPTWp4lWs8OpSEy+BlHl8TGTDIw4ysgByFYp2bDiSrs52p4TUKV8nzeJ5KmGNaeii5MPHyUx4qsQjyopV1PL0wRzXNSBTkJOvF5q6u4tuC7wwRxTOlO9TGWpap8lFSFCCjPgBgOXHg/YrgYlKLZtopLfFX26lSdCsUlVd7rC8UrDlyR4g7Mj8iZFHPIX05ew5rmmqEtiE42T/cW4kgjuzUc1Ra3pvCgqa2ppg1VMcduMTHz8okDDOCHjJUk40hSTXSzPDa64VVMEpjcaGoWJau6VtcJcsC+O64IyjFSUI9xrmuadphI4CcWeoslzrKuy0r1UMFLWCoZY0VLpI6EsmJMnkp80fJACqgKysAdUGusF+W/wB2qIbVEaaFjcquit5kYvG8bB3lmBDYVS6SomOBxlSuMc1zRNmyE4EFWm2bftF+25FT2rb/AINXWsJralLWZpkEkYbxJ5VBAUAF+LckcITxDAks9u2O30lZBb6WtW5QUcs1VWXWaOVbWAOapEGJLHw3Dr4nnjPLjlOWNc1zUg0BsqM5hO66+WW2LHuHcUrXWtqk8WhujmOjNOuBxcKzgsCPI7KAweMedtfINk1N8oW3Lu0Sx1NUFmeprapgscPA8zEilW9JC5UnmGiLDkCQ3Nc1FvvgKcQFOy2ye1WuGrrUp3qYI2p46mnpklraqTPdgrDC8izOSArMmGCHj2ot9mpZ5qKSjRjV2lZokiS4lbi02eQ5vEPMOxUDPmBXKggnXNc1L3RIUYghSexKCnlt1JURUC11fc6Cp8CjppyGdFcs5qBnJZgEU8uZDKfKQxJmrPFLVbqpopGWpvT06kwCJhTUEIjyyucZZGUhjHg4xyQrjOua5oPMpNJOFzekl7uUcVLS3Jqy4RtJNNcKqUJSxQRpmQp5iCBHwQEhwc55D2ql0lks1RBbI7xdrTZXMLvWohNRJMgEksojZiyd2U+Ip49jgle2ua5o1MyFMJ3S/P8AOluspqKWhqxyi8Gpc1TNMQgqX4A8F4hSwPcdx5scTLVFot1vpqE7tpLXTTVDCGgtNJGYsSAFfEfuphJyrODxU55DPprmuacAFRPNf//Z)
今回はこのロボットのセンサー類について紹介していきます。
今回もRoboCup Junior Soccer 2017 japan Openに出場したロボットの紹介です。
ロボット紹介(センサー編)
![IMG_3427[1]](https://livedoor.blogimg.jp/revolution_include/imgs/b/a/bae18b5e.jpg)
今回はこのロボットのセンサー類について紹介していきます。
このロボットにはこんなセンサーがついてます。
使い方やプログラム上での扱い方についてはまたいつか。
この二つは原理は全く違いますが、ほとんど同じような働きをするセンサーです。

コンパスセンサーは、地球の地磁気を感知して自分が向いている方向を出力するセンサーです。つまり方位磁針です。
コンパスセンサーの気持ちになるとこんな感じだと思います。(北を基準にしているかは知らない)
メリット・デメリットは
ロボカップの場合一つ目の欠点が大きいです。当日になるまでフィールドの磁気の状況が分からないことが多いので、本番勝負になってしまいます。
2つめは体験談です。なぜか動き始めると向きが無茶苦茶になってしまっていたときがあって、それは電源線が近くに通っていたのが原因でした。(ちなみにスマホも結構なノイズを出しているようで、スマホを近づけても高速回転します。)
一方ジャイロセンサーは、自分の回転や加速度を積分していって現在の自分の向いている方向を出力するセンサーです。積分なんて難しい言葉を使ってみましたけど、つまりは自分がどっちに向いたのかをどんどん足していって今の向いている方向を検出するセンサーということです。
ジャイロセンサーのメリット・デメリットは
コンパスは『繊細な優等生』ジャイロは『じゃじゃ馬だけど頑丈』というイメージです。
誤差の修正が出来るならどこでも使えるジャイロが強いと思いますよ。
今回は会場でコンパスがダメだったときにジャイロで動かせるように、どちらも載せていました。結局公式試合でジャイロは使わず、瀬戸内オープンでだけ使いました。
結局公式戦では使いませんでしたが『じゃじゃ馬』ジャイロセンサーと格闘するのもなかなか楽しいので、ロボカップで何か挑戦しようと思っている人はジャイロセンサーを使ってみるのもいいかもしれませんね。
このIRセンサーというのは簡単に言うとボールを追うためのセンサーです。
RCJ2017の場合ボールから赤外線が出ているのでそれを見るためのセンサーです。RCJ2018からはopenがオレンジボールになるらしいのでIRセンサーは使えません。あくまで専用のボールを見るためのセンサーです。
使っていたセンサーはTSSP58038です。
![F7730382-01[1]](data:image/jpeg;base64,/9j/2wBDAAYEBQYFBAYGBQYHBwYIChAKCgkJChQODwwQFxQYGBcUFhYaHSUfGhsjHBYWICwgIyYnKSopGR8tMC0oMCUoKSj/2wBDAQcHBwoIChMKChMoGhYaKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCj/wAARCAEXAbwDASIAAhEBAxEB/8QAHQABAAICAwEBAAAAAAAAAAAAAAYHBAUBAwgCCf/EAD0QAAEDAgMFBAkDAwMFAQAAAAABAgMEBQYRIQcSMWFxEyJBURQjMkJicoGRoVKxwQgV0TNDgiQ0ROHw8f/EABYBAQEBAAAAAAAAAAAAAAAAAAABAv/EABsRAQEBAQEBAQEAAAAAAAAAAAARATFRIQJB/9oADAMBAAIRAxEAPwD1SAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAai74ktNpR3p1bExW8WouaoBtwVtV7ZsI00qsdVvcqfpRP8mbaNq+E7pKkcVwSN66IkiZCETwHXTVENVC2WmlZLE7VHMXNFOwAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAHzLIyKNz5XtYxqZq5y5IgH0YN2utHaadZq6ZsbU4J4r0Qr3H+120YdhkjpJWTVCJovH7IeX8ebTbriOokV8z44XLwR2qpzLBc20vbi2DtaOzOy4oqsXX6u/hDzxiHF9yu0z3VVS9Wr7iLkhGairVyrmqqphvlVwozZK16qveU5iuEsbkc1ypzzMGON73ojW7yr4Ibyiw7UVLUWRytz4IiD6LL2SbXblhu4RQVE7pqJ6ojo3rmh7DseJbZeKelkpamNH1LFcyNy5OXL2kTzyzTgfnTdLRUWxUeq5s/UngW5gi6S3nZvdKRZ5I6yhjWto5mOVro5Y0zzRebd5PqIX49pg8v7Kv6hpYlhtuNkWaLRra9id9vzp49U16npe3V1Lc6KKrt9RFUU0qbzJY3bzXJ1IsZIACAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAcSPbGxz5HNaxqZq5y5IiHJQf9TmN6izw0FptlTGivRZqqPP2k4NYuXDxXLoBY+JNpeG7LTSPS5UtRK1PZjlRUz6/4PNu0jbVcb3I+C3yrHT55IqaJ9E/lTV2SvtWJqXdRraesVMnMembH9U8uaaoRDFeFnUr5pKFd3cyV9O5e8nyr4p4lEbuFzmqZXSTyOe92qqq6mslmVV4nXIq7youaZeZkUdDLWSI2NuSfqy0IMZN56oiJmqm1tllnq1RVRWtJLY8MI1GySN3ncyW0tDFTNzeiIhrPylaKy4cjhyVWarxVUJRBDTUkecm7oa6vvENHE5d5rUTxVSD3XElTWvVlGi66bymrmJ1uccXKBzEZG1r3PTdRqfucWSvlw9hOvl9mSoidC1PnTL9szQ263PWXt6x7nKvtIqnXiK59tCyip3eqRc35cFUzu/1WuSRM0VOBYuy3ard8CVzUglWe3Pd62kkXuuTzTyXmVzR01RVu3KZiu8FVOCEntuF2NRH1z1ev6W8DMXNj3lgfFlsxnYYrrZ5d+J3dexfaif4tcSA8/f0uujpam9UNO1GRLHHLup5oqpn+T0CF0AAQAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAFO/wBROK7xhqhtkVmq6iD07tInJTsasiqiIuaOXhki8UPK3ayzyVUFe9Z3udvSOfJvOVztVzz1VeZ6M/q4bUNs+Hp6VqK9k8yKvVqHk2OsnpVequYkj3K5d5uahMd1bDU2qoZJDJIxiOzjei8OS8zOumJ627R0jarcV0Dd1XN0dI3PPJTC/ur5WK2oyex2nw/Uw1ibvK6BUe39PigVntbFcbgz01c6h6tRXMRF3kyy1y8dPqTe2WuKmVqKiNRE00z6EOsdt/u0rmRKjZ803M9M+Rv6+vntVBHHWI5rm5xovjmnFF5p+2RrNTW/qq6Kkj3s0VEXLTzIleMUq9XMgzc/PLTgaKpqqu5yZJvNj4dTvjpIKOLfncic1/gb+iMdkFTcZFdUyKjeORn79HbWbqJvzfpTj/6MCsuum5So6Nvi5faXp5HzbbRVXF29ksUK8Xu4r/kiviquFRVv7Jma7y5JFHw+vmba14aknc2a5KjUyREjbkmieeRvrXaaW3s9SzN/i92qqZ2ZYj5p4YoI2xxMYxjUyRGoiHdvHWc56BVx/wBNMqJiq4x+L6NV+z2no080f02MeuNqpzUXcbRv3l/5NyPS5ldAAEAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAGJdLjR2qjfVXCojggZxc9f28zz9tL2mVl7q22+wPqoKVc2IyL251VfFETPLl9wLQxntLtOH3SU1M9tZcGp7DXdxi/E7+E/BCrHtlqG1uV1jgmpnL/tJuOZ0zXX6/cj+BNlFxvM3pF/Selpm5KjJEyc/NEXh4ITmo2IWN9B2UNbWR1KZqkq7qpx4ZZJoSiNbf8TWO8YUtdTR1kcz4ajfdDwejVbrovPI8w11sqrtdp6ymoP8ApE9Y+NHZbrE45u4IXljHZfcbBap7jeJI6m30rmpuROyc/Nck1do1PMgCXalqolpJI2wUmStSOn0TXxVV1cvNTSKySjmVZVjgWOJVXdR3XTU+2ywwMiR0PfRM1VF1z6k7ulfa7c9HtTtG8WwouqkCqoJKupkqIo1bTucr3KxFckTVX+CbhW7wxM2G5JNG7ydl56/ub3GVbTVt69Eem/2kcbl5PTNE/Cp9iDUVQ6iqFkhR0jGquSq3LPQ5T0m41qvavrpNc14f/gxWZWXGGFqspGouWiuXgn+TWwx1dyn9S18j/F68E/wbuz4ZdNuy3B2TfCJv8r4fQlUEENLG2OFjWMTwRMiwaO14bhpnJJUuSaRF4+79EJAxrUTJqIiJ5HCrqGrxKPtcj5VdT5VTuo6aesqY6elhkmnkXdbHG1XOcvJEA6yQ4PwbecW1iQ2qmVYkXKSd/djj6r/CalqbPtibn9nXYtcrW+02ijXVfnd4dE+5elvoaW3UkdLQU8dPTxpk2ONu6iEojGzjAtDgq2Oigd29bNks9QqZb2XgieCIS8AgAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAARTGGOrRhmNzJ5e3rMtKeJc1T5l8AJTLLHDE6SZ7Y42pm5zlyRE5qVNjza7R0Mc1Jh5UnqdWrUqncbzb59V06kMr71inaVcFpbfG5tE12TmNzbDHze7xX/wCRCx8E7LLZY3Mq7nu3G4p3ke9vq41+Fq8eq/gCsabD2M8dIlXWvkhhdkjZqt2WaebWceHJEXzLcwHs/tmGYUkihSWrc1N+qlTORy8v0pyT8k1jhjZ7LUOwk3ejhrUamScDk+ZZGQxq+V7WMTi5y5In1K9xptRtVkjkhtz2VtZwzavq2LzXx+hRLsS3C0UNsmS/SQeiSNVropU3u0TyRvFTx7tDtmH6esr67Djp6aOZcqWjeu+7f8URPBOWqoTa2WzFO0e9SVlO1/YvdlJWy92JuWmTf1ZZcE/BdWDNm1kw7HBPNTRVt2Yu8tZK3NyO82J7v0/JUeJqTC1Y3ta2+Q1UUbHN342xqrl3kzTedwZp569CSWmmpam2rSJNHBE6RrlZkqoqIvjlxU9f7QcA2nG1kS3XBJIUYqvifC5Wox3mrU0X6nmHF2yHFWCKKsrqeFLnRRvVrHxKrljZln2jmJqqftlroQRG+Utqt9NUtqHOdvxuSFsftqvgvIhVnurrfXxVSRJlHmjW5aO0yyXz8MzKoK2Fb3DUXiN9TDvesRz1RF65a5dCeSYVpb3cH1tFDTrTK1Hx9g1WxK3RMk8lTnqvEvTjCtdR6RQQTLl32IvTU7VVNfEyrnbo7XVOoqZFSKLutRVzUw+PUqvleCcjiF6vRVyy1yRORn2u1Vl4rI6O300lTUSaNjjbmq/+uZf2zzYrTUHZ1uKlbU1PtNpGr6tnzL7y8uHUlFVYD2c3rF8rZIIvRbei96rmTJv/ABT3l6fc9J4HwJZsIUyJb4e0q1TKSqlTOR3TyTkhKIYo4ImRQsbHGxMmsamSInkiH2QAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAOHuaxque5GtRM1VVyRAOTX3u80FjoXVd0qWQQt/Uurl8kTiq9CA452r2+zskprNu1lWmna/7bV5fqX8Fc2mx4o2kVyVtZK+Ohc7J1VPomXlG3x+mnMcG5xhtZrrrItBhuKWCORdxrmIrppOmXD6amVgzZNVXCRK/F8sjGOXeSjY/vu+dycOia80LGwVge04ViVaKFX1LvaqZsnSLyRfdTkhKx0YVttVFbaWKmoadlPTxexHGm61PonH6maDAvN3obNRuqblUsgianvLq7kicVUQZ5FcX46tGGY3tqJknrETSniXNf+S+6VfjPa1WXJ62/DUUsKSLuI5ib0z15ZcPpqc4P2S194ey4Ywmkp4nLvJSNX1r/AJne7049ANNcsSYq2j3D0C10z3U6Oz3I+7FH5K93+fohNcMbGKGN8NViep9PnYu86miTdhVfJ2ervx0LRtNrorRRMpLZSxU1OzgyNuX1XzXmpmAddLTw0lPHBSxMhgjajWRxtRrWongiJwOwGBebvQWWk9JulTHTw55I53ivkiJxAzyA7QNqVgwhBJHJM2uuOqNpYXJovxv4N/fyRSD482xpLBJBhuRIol7vbvTde7oi+yn56EJwls7vGMJfTK6H0a1SuarpqlV35Wq7ixuWfjxXJOajfgqeCw3zH2LK11ktO9PVVD5HRU6ZRQI5c9V4NamfFS0a7AkGyzDlO+43ts+IKyZipQwr6tkaIu8uS6rrkm9onhkeobBZLdYLdFQ2mkipqdiZZMTVearxVeamuxlgux4wo0gvVG2R7E9VOzuyxfK7+OBMHkPEL3TXSV6u3leu8ieSLqn7/kmez3ZTd8TrHVViOt9rXXtZG96RPgb49V06lw4R2QWSx1y1lc910qGOTsu2YiMYiJkmbfFea/YstERERETJE8CjRYTwpaMK0SU9opWxqqd+Z2sknzO/jgb0AAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAMa411LbaR9TX1EdPAzi+R2SFM432wPc59HhpisRe6lQ5M3uX4W+H79ALLxdjO0YXhX06ffqlTNlPHq9evknNSkL9i/Eu0C4LbrRBJ2C/wDjwrkxqfqe7/OnIz8K7MrtiGo/uWKpZ6SGRd9IVXOom+bP2U668kLssuH6C00EVJQU0dNTM/2o09pfNy8VXmpL4K3wNsmo6V0dbfnMuNYi59mqeojXovtr105Ft00DYI2tbqqJlmdqJkmgGZ6B8yyMhjdJK9rI2pm5zlyRE6kSxnj+0YYbJFLKlRXtTNKeNdU+ZeCfvyKSu+IsUbSbqlHbIZnxoqeohVWxRp5vXh9V+hRY2OtrlFbGPp7Bu1NTwWdyerb0T3l/HUr6x4cxZtGq0rqyaWGhdo6sqeCp5Mb4/TJOZPMD7JbfQKyqvr2XO4IuatyzgiXyyX2l66ci2IYmwxNjYmTGpkieQvgi+DMCWXCkKLQwdrWqnfq5kRZF6fpTkhKwAAXRNTSYlxRa8Owb9xqESVUzZCzV7uieXNdCl8TY7v2LqpbbZIJWxyLutp6fVzvnd5fZALCxrtNttja+C3Kyurk00d6ti81TivJPuhV1HasUbTbp6TPvMpM8lqpkVsTE8mInHon1Um+CdkrYOzrMWzMrajilKxPVNXw3l95eXDqWxBDHBEyKFjWRsTJrWpkjU8kQXwVthzY9YrRWR1VS+S5TMTNqVLU3Gu80Ymi/XMsiKJkTURqJoiIdgJAABQAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA0+JMSWvDtL210qWxqqd2NNXv6J/PADcECxptLtNgZLBSPZW17dNxq9xi/E7+E/BWeK9pV6xTVra8PwSshmVWNhp83SSJ8Sp+UTTzzN5grY4r3RVuLpd+TPeShid3U5PcnHon3HBFIWYs2oXRVY53orF1mkTcghTyanivJM18y3sC7NrPhZWVO6tbckT/uZk9lfHcb7v78yaUtLBSU8cFNFHDCxMmxxtRrWp5IiHcTo4RrUVVRNV8Tk+ZZGQxukle1kbUzc5y5Iic1KrxzteorWrqawtZWT6os7v9Nq8k4u/bqUWLfb3brFRrVXSqZBEnDPVXL5IiaqUdjfa5XXSR9vw9G+nhkXcRzM1mk6ZcM/JNeZH7ZZMVbSa9ayV8rKNy5OrKjRmXkxPe6JpzQu3BGz60YXjR9JAslYqZPq5slld57v6E5J9RRWGCtk9feqhKvFk0lLDo/0Vrs5nIvDeX3UXJefQvOyWahstCyjtdNFS0zeEcacV81Xiq81M9jGsRd1ETPjzPogIiImSJkgBCcY7RLXYEkgp3Nra9unZsd3WL8Tv4TXoUTCsqoKKnfPVzMhhYmbnvdkiFTY02rNa2Slw5mir3fSXNzVflb/ACv2Imq4q2k3LKLe9Ea7J0js2QQ9PNemalq4J2dWfDW7Uq3025eNTMnsr8LfDrx5gV1hbZ5esTzpcMQTz0tJKu8va5rPL9/Z6rryLmw7h+2YdovRrTSsgYur3cXPXzc5dVNqAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAB11NRDSwPmqZWRQsTNz3uRqInNVIfjXaHaMMNfCr/S7giaQRro1fjd4dOPIpmqu2Kdpt3Slp45X0zX57sabsMHNVXx6qq+QE6x1tggo+0pcOI2aRM0WpendT5U8eq/ZSH4cwDiLHNV/c75UTUlHKu8ss6KssifC1fDyVdCyMC7K7ZYUjqrpuXC4ou9m5ucUa/C1fHmv2QshEyTQDQYTwjaMLUawWqmRjnf6kz+9JJ8zv44G/RETgDX3y80Fjon1VzqGQxNTNEX2nckTiqiDYEUxfjuz4ahkSaZtRWNTSnicirn8S+79SpsbbXa66PWjw6yWlicu7m1M5ZM9ETTh0TXmfGDtkt1vUrK3FMstDSPXeSnbrNJ46+DPrryQcGqvmKsTbRLklvtkEkkaqipTQaRs+Jy/yq9Cf4H2O0dDuVeJnsuNXmjkgTPsWdf1/XTkWTYrDbrFQto7VSx01O33WcXL5uXi5eam0J0dUFPHCxrWNaiNTdajWoiNTwRE8EO0HzNLHDE6SZ7WRtTNznLkiJzUo+jV3+/W6w0iz3OpZEnuszze/oniV9jbaxS0KPprBuzzaotQ9O435U8eq6dSHWHB+JMdVf8AcLrNLTUUi5rUzp33p5Mb5c9E6gZOKdot4xLV/wBrsFPPFHKu62KHWWTqqcE6fVVN3gvZPm5lZip++5NW0cTu6nzuTj0T7qWHhTCdqwxSpFbadqSKmT536ySLzX+E0N+To6aSlgo6dkFLDHDCxMmxxtRrWpyRDuAKAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAD5kkZFG6SV7WMambnOXJETzVSqscbX6G2OfS2FGVlQmizuz7Nq8v1deHUCxr5erfY6Nam6VLIIvDP2nL5InFVKOxltVuV8mdbMOwzQRyu7NnY5unl6ZcOifc1dkwvizaLXrcK6aSnopFzWrqEXJU8o28VTpknMu7BeB7NhKDK3wLJVuTKSrmydI/6+CckyArDBeyCqr3MrsXyPij9ptFG7vu+dycOia80LstdtpLXRx0tvpoqanZwjjaiJ15rzMsEgHxPLHBE+WeRscbEzc965Iic1IfjbaHZ8LtfFI/0quRNIIl9lfiXw6ceRR9zxFiraPdPQ7fFLMze0ghRWxRp5uVdE6qvQos3G216htm/TWJraufLLt3f6bV5J734TqVvabDizaVXrWyOeyjcuTqypzRmXkxPe6JpzQsbA+x232xY6zEr23KuTJyQ/7DF6e/8AXTkWuxrWMaxjUa1qZIiJkiIBDsEbPbNhRjZaWHt7gqZOq5kRX/8AFODU6fkmSJkAIAMK73Whs9G6quVTHBCni5dVXyROKr0KXxhtWrbnMtBhqOWFki7jXtTemlXkicPpqBZmL8cWnDMbm1EqT1mWlPGqb3/JfdQpq43zFG0a4LS2+Ny06Ln2bO7DHzc7z66+SG4wpsrrbnKytxZLJBE52forHZyP5vcme79NeaFy2mz0VqpY6ahpooKeNMmxxpkic+akvghGCtltts/Z1d1yuFwTJyK9PVsX4W+PVfwWOxqNaiIcgZgAAoAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAYtzuNHa6R9VcKiOngbxfI7L6J5ryAyiLYzxxaMKwuSrl7asyzbTRKm8vln+lOv5Kqx7tlqKmV1BhmKWGJy7npGWcr1+FE9n9+hiYP2U3jEkyXDFU01FSyLvrEq5zy9c/Z+ua8kA1l6xTijaRdf7daoZHU6uz9GhXdYxufF7v5X6IWPgPY/b7Q6OtxC5lxuCd5IsvUxr0X2l5rpyLDsFituH6BtHaKSKmgTVUYmrl83LxVeamyA4a1GtRrURETRETwOTqqqmGkgfPVSxwwsTNz5HI1E+qlR482xU9Cj6XDrWzSao6pkTup8rfHqv2UCysR4jteHaRZ7pVMi0zbGi5vf0b4lG402u3K7SehYfjfSxvXdb2felkzXRM04dE+5qbBg/FO0SrW4VcklPRyarW1Waq9Pgbxd+E5l4YI2fWTCMaPooe3rlTJ9XN3pF6eDU5J+RfBV2DtkNyvMjK/F80lLAq7yUrHJ2r/mXg38r0LxstooLJQMo7VSRUtOzgyNMs181Xiq81M9NAAANBirFtqw1Tq64Tos+WbIGLm9308E5qBv3KjWqrlRETVVXwK4xrtRt1mbJBalZWVaZor8/VsXr730+5W2I8cYgxtWrb7RDL2Dl0p6fhl5vd5dckJfgjZLFSyMrcTbldU8W0+fqmdf1ftyFzBD7bZsT7SLglZVyysoc+9VSpk1G+UbfH6aealy4OwNaMMwZ0cCuq3Jk+pl70ip5Z+CckJNS07KeFsbEaiN0RETJE6J4HcTvRwiInBMjkAoAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAXRNTU4nxDbcM2x1dd50ihz3WomrpHfpanip5/xTtJv2N6xbTh6nmjp5l3WwQavkTzc7y+yeeYFo462qWrDzHwW9zK+u4ZMdnGxeapxXkn4Kfp6fF+1O5OmjVzqVrt108ubYYk8mp49EzXzJtgXYsxix1uLpfSJc80oondxPnd49E05qXTR0lPRU7IKSGOGFibrWRtRrWp5IiC+CD4C2b2rCitmZEtXcFRd6smRM28mJ7qfnzUnyIiJoDTYmxNasNUnb3WpbHmncjbq9/RCZg3JA8a7TbNhxJYIJG1twbp2THd1q/E7+EzXoVVjPapdsTzLbMPQzwQTLuNihRXTS5+Cqn7IbLAexeapljrcYOdGxdUoYXar87k4dE+5eCOVl0xbtNuqU9FE+aJrvcRWQQp5qvD75qWhgXY/bLK9lZfXtutwRd5Gub6mNeTV9pea/ZCyLXbqO1UUdHbqaKmpo0ybHG3JEMoDhrUaiI1ERE0REOQAB0V1ZT0FM+orJo4IGJm573ZIhDMcbSLXhtkkECtrLgmnZtd3WL8S/wAJ+Cn3VGLNpVeskKu9EauXaO7sMfJqeK/nzHOiZY52vNYklHh1rkcvd9Ic3vL8jf8AP2I/hfZ5esWVSXDEsk9JSSLvq1y5zy59fZ+uvIsbA2ze24fbHPKz0qv3e/VTJmufwJ7qfksCONsbcmJkhLu8Gnw5hq24fo209tpY4W+9u8XL5qvFTdImSaADMgAAoAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAwrvQQ3KjfTVdPDUU70VHxyt3kVOhp8FYUtGGqF7LVRJTrK9znufmr3JmuSKq65InBCSgkA6ayqgoqd9RVzRwQMTN0kjka1Pqp3FWbZMH3fE0KTWe5vRadERaCVUbE74kXwXXxz+hbBp8e7aYKdslJhhu/JlktW9NE+Vq/uv2ITh3AuK9oNalxuk0tLRy6rV1WauenwN4r10QtLAWyK02Ds6u7btzuaZO3pG+qjX4W+PVfwWeiIiZImSE6IvgvA1kwjT7tspkWpc3KSql70j/r4JyTJCUAFAHD3NYxXPcjWomaqq5IiFWY92tUVqZJS2F8dTVpos7kzjZ0T3l/HUCwb/AH23WCjWpulSyFnutXVz18kTxKPxbtQuuJKv+04Zp542yrutZD3pZOqpwT/7M19iwfinaDWJcr1VPpqGXVJ5kXfenwM8vshd2EcGWjC9N2dtpmteqZPmf3pZPmd/CaC+CuMF7IVkljr8XSJO9U3komO7rV+N3j0TTqW/QWykoWtbSwRxNa1GsaxqNaxPJETgZqJkmSAk9AAFAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA65oWTIiSJmiLnxyOwAAAAI5i7GNpwvTq64To6oVM2U8a5vd/hOakM2wY8u+G1Sjt1vmgjl7ra9zd5rnL7rMuC9dfJCH4P2YXbFEzbpiqeanppHb6wuVVml6qvs/uPgw7zi7E20W4LbbJTyJTKusUS5MYnnI7/P0QnuA9lNvtDoa26qy53JF3t56epiX4W+8vNfwT+zYft1no46S30scFNH7MbEyTPzVeLl5qbYnR8RRMjRN1EzRMsz7AKAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAwq6gZWN3JWskjV7Xq17UXJUVFRU55oZiIjUyRMkOQIAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAD//Z)
これはなかなか優秀でした。デジタルピンにつないでpulseInで読んであげれば結構いい値が出ます。

使った基板の裏はこんな感じでした。
僕たちの場合はこんな風に円形に45度ごと配置した8個のセンサーを使ってボールの方向と大体の距離を検出していました。(赤丸がセンサーです)

どうやってボールの角度を求めるのかというと、僕たちの場合はこんな風に数字をすべて振って

それぞれのセンサーの値に三角関数を使ってX軸とY軸上のベクトルに直して、それをすべて足してできたベクトルを合成してボールの方向と距離を求めていました。
まあこんな難しいことをしなくても一番値が大きいセンサーと2番目に値が大きいセンサーの間にボールがあるという求め方をしてもロボカップに必要な精度は出ると思いますよ。
僕たちは8個でやりましたがチームによっては4個というチームもあります。なんと3個というチームもありました。

このLEDはすべて一枚基板の上に乗っています。
これは没基板です。

大きさが分かっていただけたでしょうか。大きい故にトラブルが勃発した基板でもあります。
四国ブロック大会の時は半分ぐらいの値が滅茶苦茶で、ライン出まくりでした。Japan openまでに大改修(2日かかりました)をして、ラインから出なくなりました。
使った光センサーはNJL7302L-F3です。 LEDの地面からの反射光の強さでラインを読み取ります。ラインセンサーは地面に近ければいいというわけでもないようです。5mmぐらいの高さがないと明るすぎて値が変わらなくなってしまっていました。
超音波センサーはざっくり言うと距離センサーです。
このセンサーで超音波を発射して壁に反射して帰ってくるまでの時間が分かるので、それを2で割って音速をかけてあげると距離が出ます。

このロボットは前後左右に4つ搭載しています。
ここで小ワザを一つ。
このセンサーは元々4ピン(5V,GND,TRIG,ECHO)なのですが

この写真のようにTRIGとECHOを1kΩぐらいの抵抗でつないで、TRIGをArudinoにつなぐとなんと3ピンで運用できます。やったね、超音波センサーが増えるよ!
その場合のプログラムはこんな感じになります。
pinModeを変えてあげるのがキモですね。(だれか超音波センサーを8個ぐらい付けた超音波まき散らしマシンを作ってくれないかな…)
ただ、超音波センサーは距離を測定するのに時間がかかるのですこし使いづらい感じです。超音波センサー専用のArduinoを用意した方がいいと思います。
ボールキャッチセンサーはドリブラーの下についてる緑色に光っている部品と、その対角線上にある部品です。


これですね。
光っている方はただのLEDで、光っていない方はラインセンサーと同じ光センサーです。
この間にボールが入ることで、LEDからの光が遮られて光センサーの値が変わるのでそれを検出します。
小さくて単純な機構ですが、これがないとバナナシュートが出来ないので大事な部品です。
終盤息切れしてしまいました。スミマセン。余裕があったらまた追記しようかな。
- ジャイロ
- コンパス
- IRセンサー(赤外線センサー)
- ラインセンサー
- 超音波センサー
- ボールキャッチセンサー
使い方やプログラム上での扱い方についてはまたいつか。
ジャイロセンサー&コンパスセンサー
この二つは原理は全く違いますが、ほとんど同じような働きをするセンサーです。
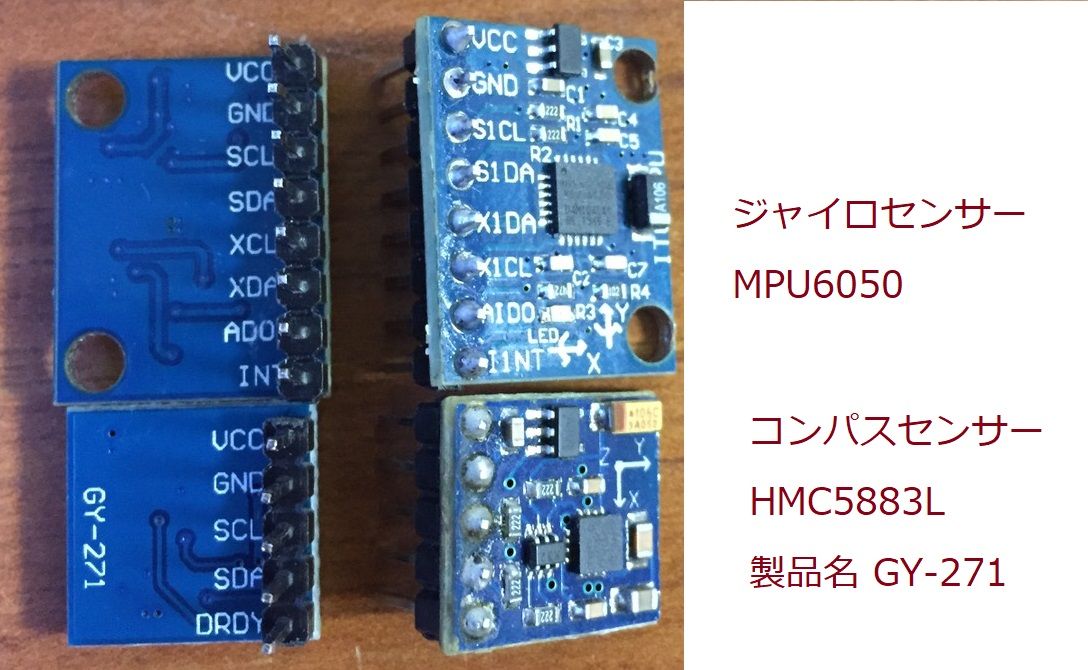
コンパスセンサーは、地球の地磁気を感知して自分が向いている方向を出力するセンサーです。つまり方位磁針です。
北が90°右に見えるから 90°
北が60°左に見えるから -60°(300°)
北が150°左に見えるから -150°(210°)
北が60°左に見えるから -60°(300°)
北が150°左に見えるから -150°(210°)
コンパスセンサーの気持ちになるとこんな感じだと思います。(北を基準にしているかは知らない)
メリット・デメリットは
メリット
- 地磁気の乱れが少ない状況では高精度
- 途中で狂わない
- 処理が軽い(一秒間に取得できる回数が多い)
- 簡単
- 小さい
- ネットに資料がたくさんある。
- 地磁気が乱れていると全くダメ
- 大電流が流れている物や磁気を帯びている物の近くにおけない(モーターや電源線の近く)
ロボカップの場合一つ目の欠点が大きいです。当日になるまでフィールドの磁気の状況が分からないことが多いので、本番勝負になってしまいます。
2つめは体験談です。なぜか動き始めると向きが無茶苦茶になってしまっていたときがあって、それは電源線が近くに通っていたのが原因でした。(ちなみにスマホも結構なノイズを出しているようで、スマホを近づけても高速回転します。)
一方ジャイロセンサーは、自分の回転や加速度を積分していって現在の自分の向いている方向を出力するセンサーです。積分なんて難しい言葉を使ってみましたけど、つまりは自分がどっちに向いたのかをどんどん足していって今の向いている方向を検出するセンサーということです。
最初 0°
10°左に行ったから 10°
36°右に行ったから -26°(334°)
89°左に行ったから 63°
90°左に行ったから 153°
5°右に行ったから 148°
…
ジャイロはこんなことを考えていると思います。10°左に行ったから 10°
36°右に行ったから -26°(334°)
89°左に行ったから 63°
90°左に行ったから 153°
5°右に行ったから 148°
…
ジャイロセンサーのメリット・デメリットは
メリット
- 会場に全く影響されない
- 周りに何があろうと関係ない。乗せれば勝ち
- 振動に弱い
- センサーの検出上限を超えて回転すると狂う(正確に足し算できないから)
- ドリフトがある(時間がたつと動かなくてもちょっとずつ値がずれていく)
- 遅い
- 大きい
- ネットの資料がやや少ない
コンパスは『繊細な優等生』ジャイロは『じゃじゃ馬だけど頑丈』というイメージです。
誤差の修正が出来るならどこでも使えるジャイロが強いと思いますよ。
今回は会場でコンパスがダメだったときにジャイロで動かせるように、どちらも載せていました。結局公式試合でジャイロは使わず、瀬戸内オープンでだけ使いました。
結局公式戦では使いませんでしたが『じゃじゃ馬』ジャイロセンサーと格闘するのもなかなか楽しいので、ロボカップで何か挑戦しようと思っている人はジャイロセンサーを使ってみるのもいいかもしれませんね。
IRセンサー(赤外線センサ)
このIRセンサーというのは簡単に言うとボールを追うためのセンサーです。
RCJ2017の場合ボールから赤外線が出ているのでそれを見るためのセンサーです。RCJ2018からはopenがオレンジボールになるらしいのでIRセンサーは使えません。あくまで専用のボールを見るためのセンサーです。
使っていたセンサーはTSSP58038です。
これはなかなか優秀でした。デジタルピンにつないでpulseInで読んであげれば結構いい値が出ます。
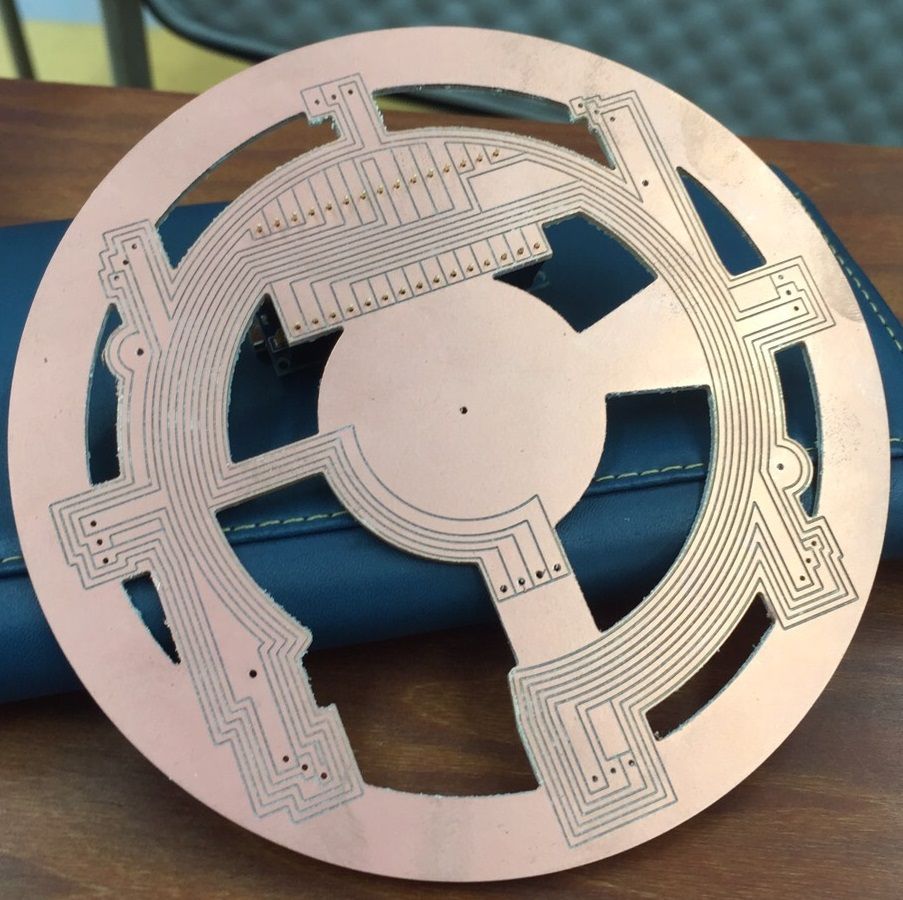
使った基板の裏はこんな感じでした。
僕たちの場合はこんな風に円形に45度ごと配置した8個のセンサーを使ってボールの方向と大体の距離を検出していました。(赤丸がセンサーです)
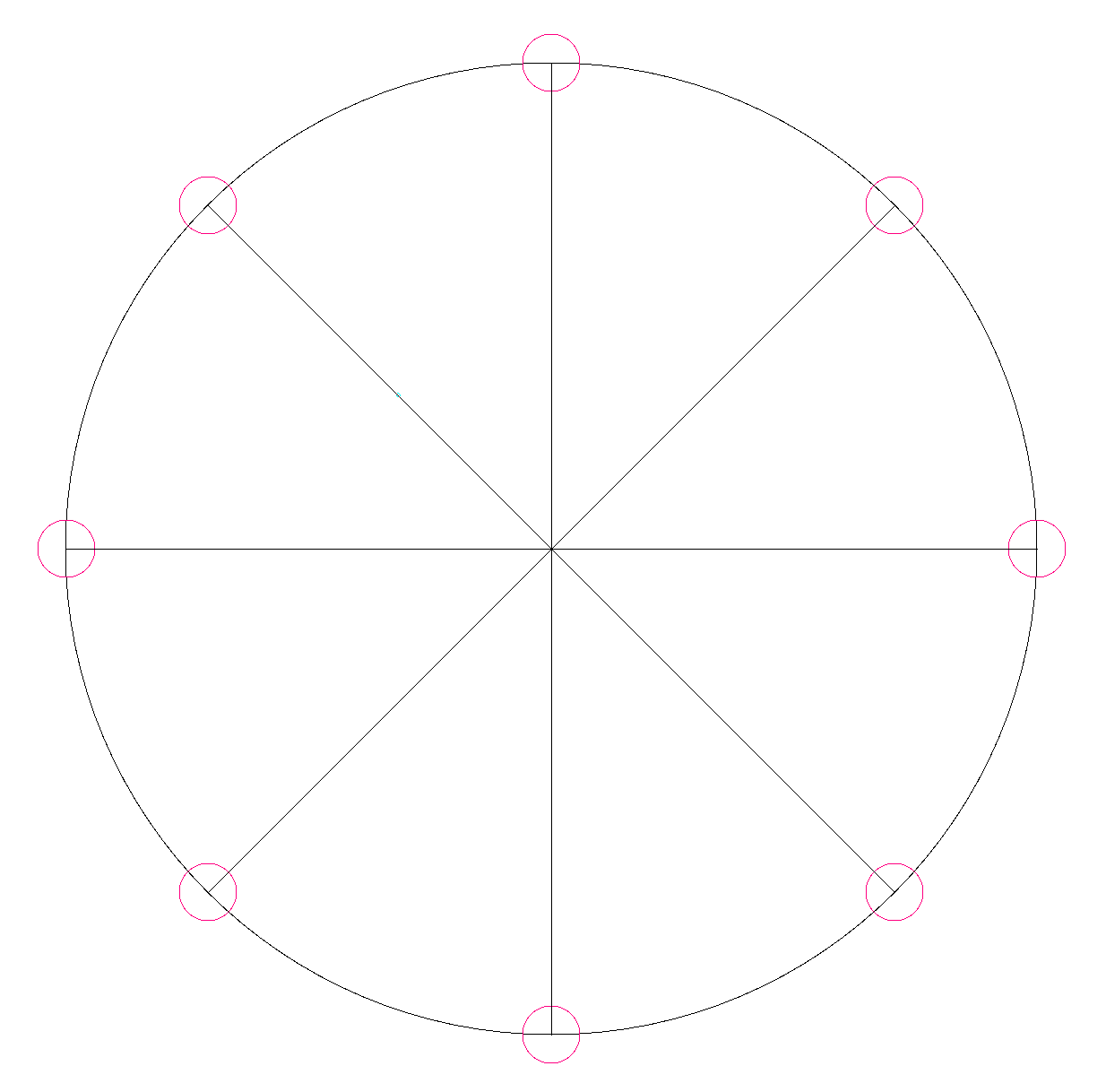
どうやってボールの角度を求めるのかというと、僕たちの場合はこんな風に数字をすべて振って
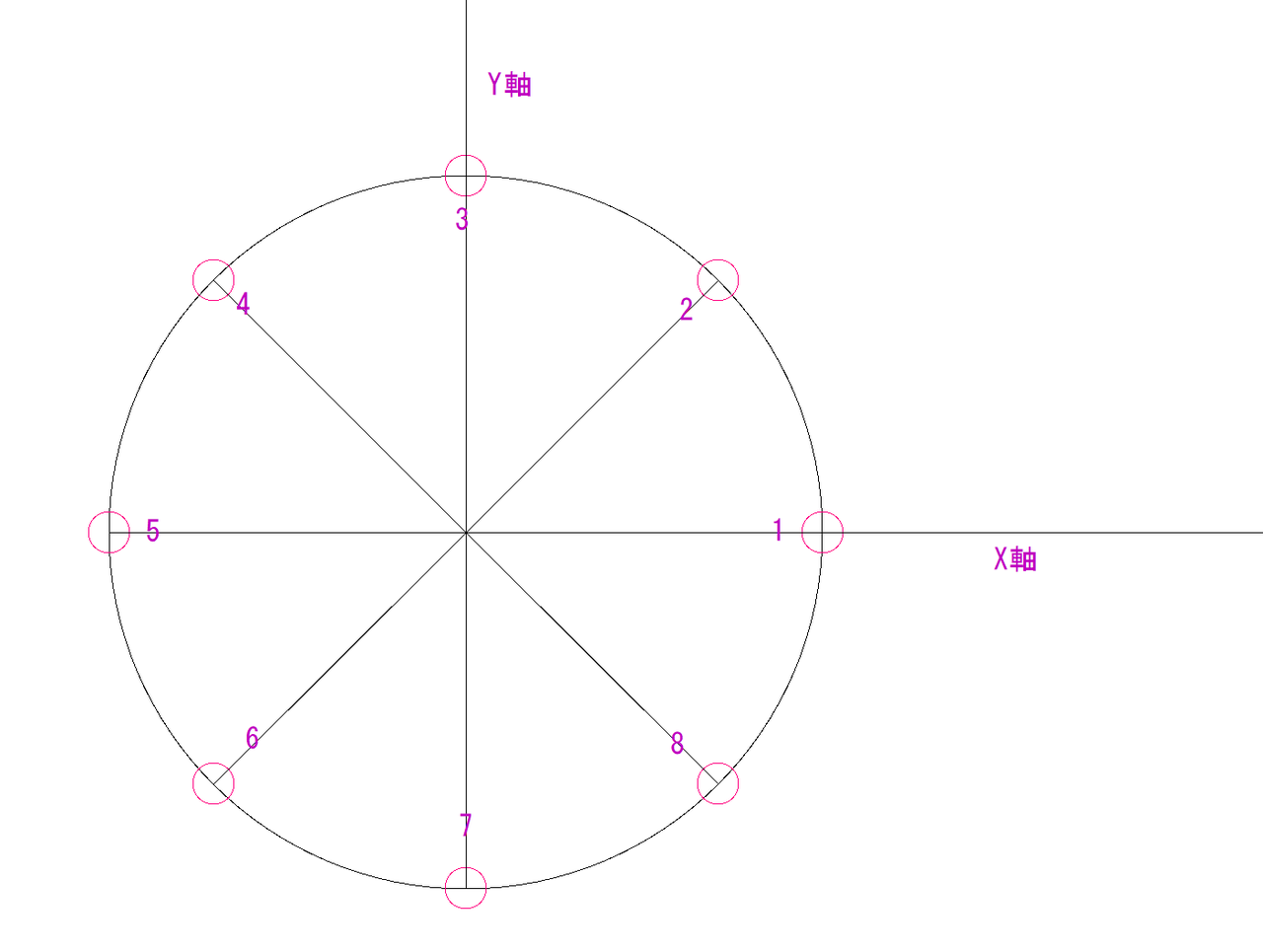
それぞれのセンサーの値に三角関数を使ってX軸とY軸上のベクトルに直して、それをすべて足してできたベクトルを合成してボールの方向と距離を求めていました。
まあこんな難しいことをしなくても一番値が大きいセンサーと2番目に値が大きいセンサーの間にボールがあるという求め方をしてもロボカップに必要な精度は出ると思いますよ。
僕たちは8個でやりましたがチームによっては4個というチームもあります。なんと3個というチームもありました。
ラインセンサー
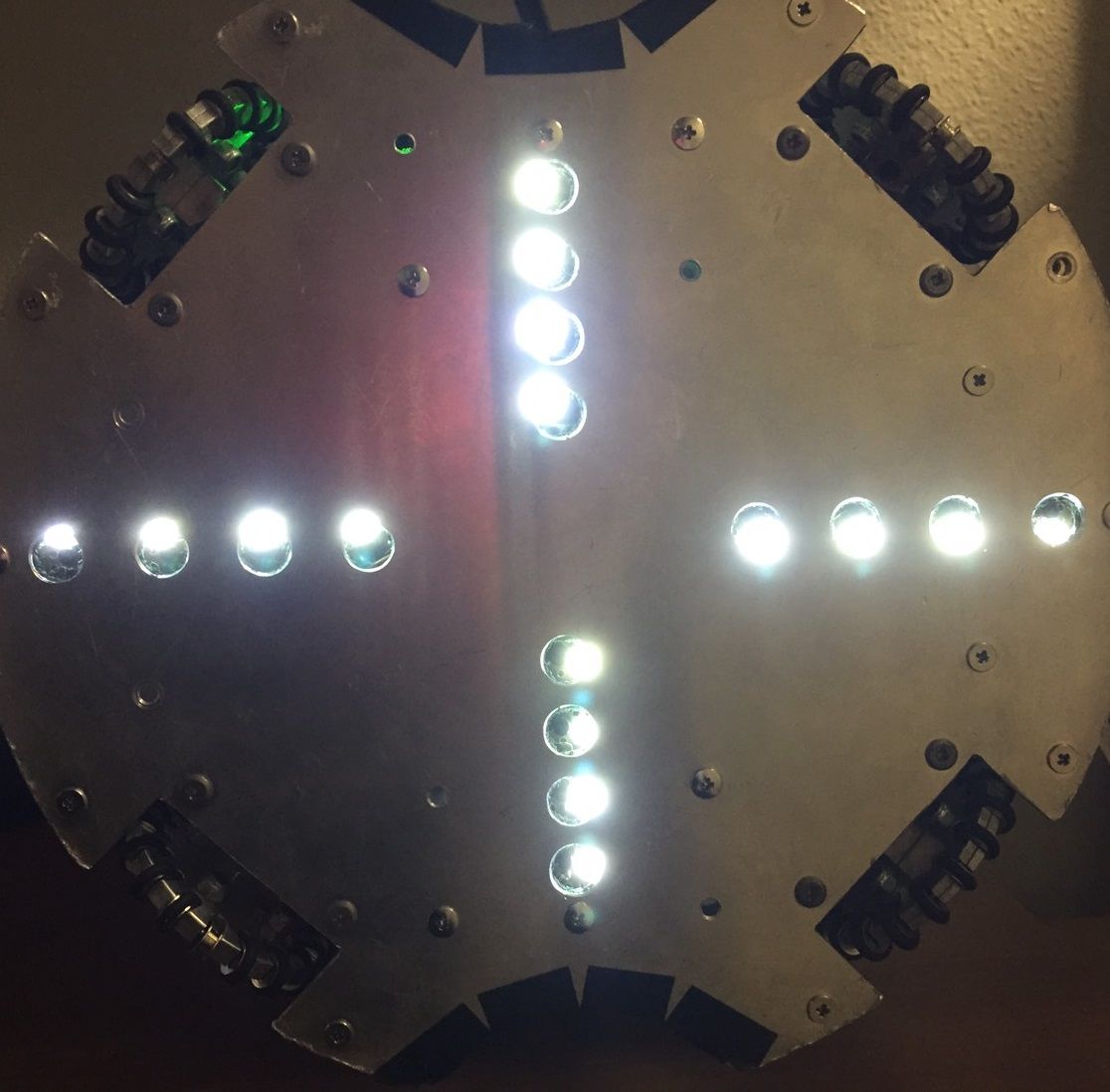
このLEDはすべて一枚基板の上に乗っています。
これは没基板です。
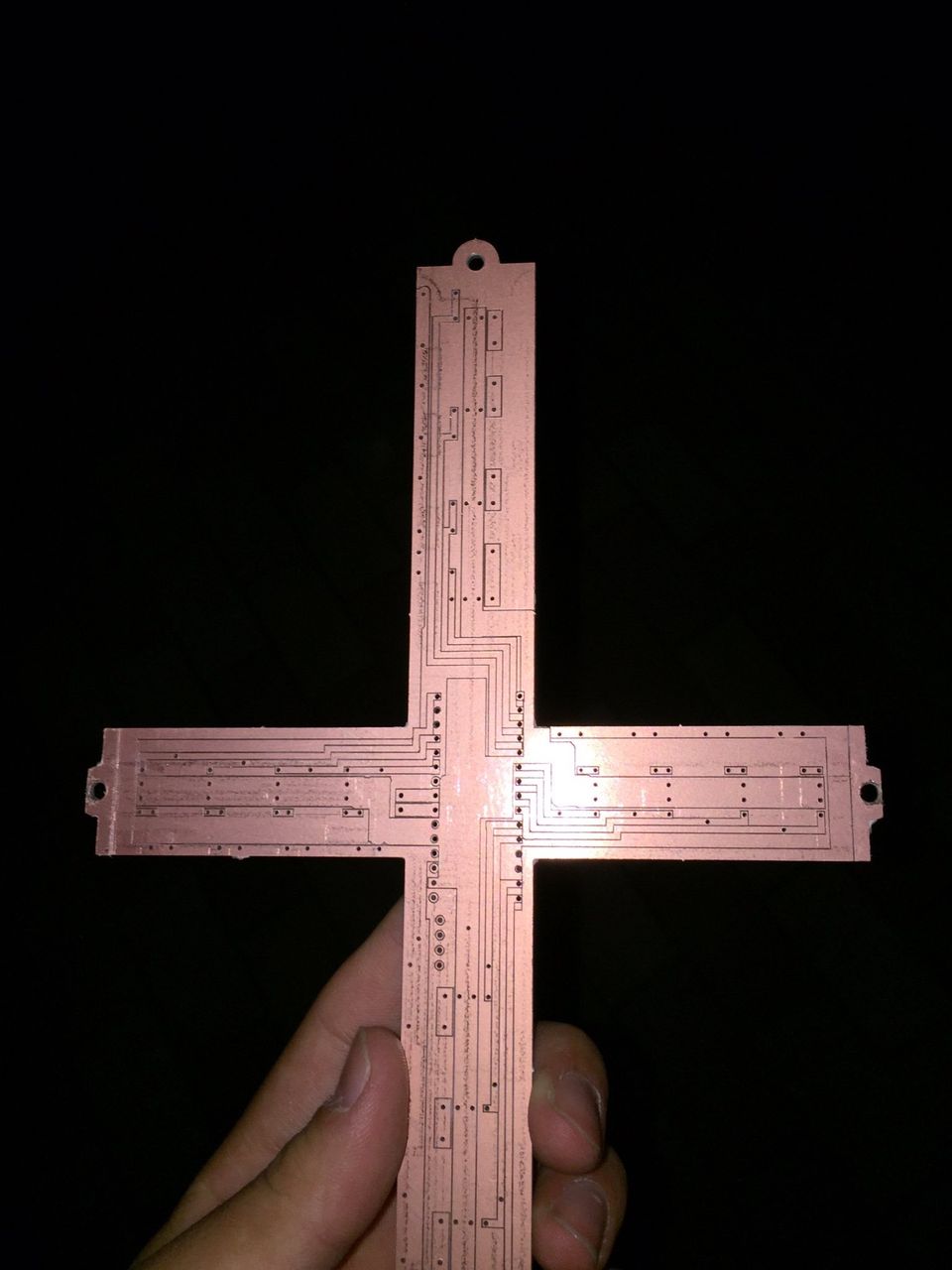
大きさが分かっていただけたでしょうか。大きい故にトラブルが勃発した基板でもあります。
四国ブロック大会の時は半分ぐらいの値が滅茶苦茶で、ライン出まくりでした。Japan openまでに大改修(2日かかりました)をして、ラインから出なくなりました。
使った光センサーはNJL7302L-F3です。 LEDの地面からの反射光の強さでラインを読み取ります。ラインセンサーは地面に近ければいいというわけでもないようです。5mmぐらいの高さがないと明るすぎて値が変わらなくなってしまっていました。
超音波センサー
超音波センサーはざっくり言うと距離センサーです。
このセンサーで超音波を発射して壁に反射して帰ってくるまでの時間が分かるので、それを2で割って音速をかけてあげると距離が出ます。
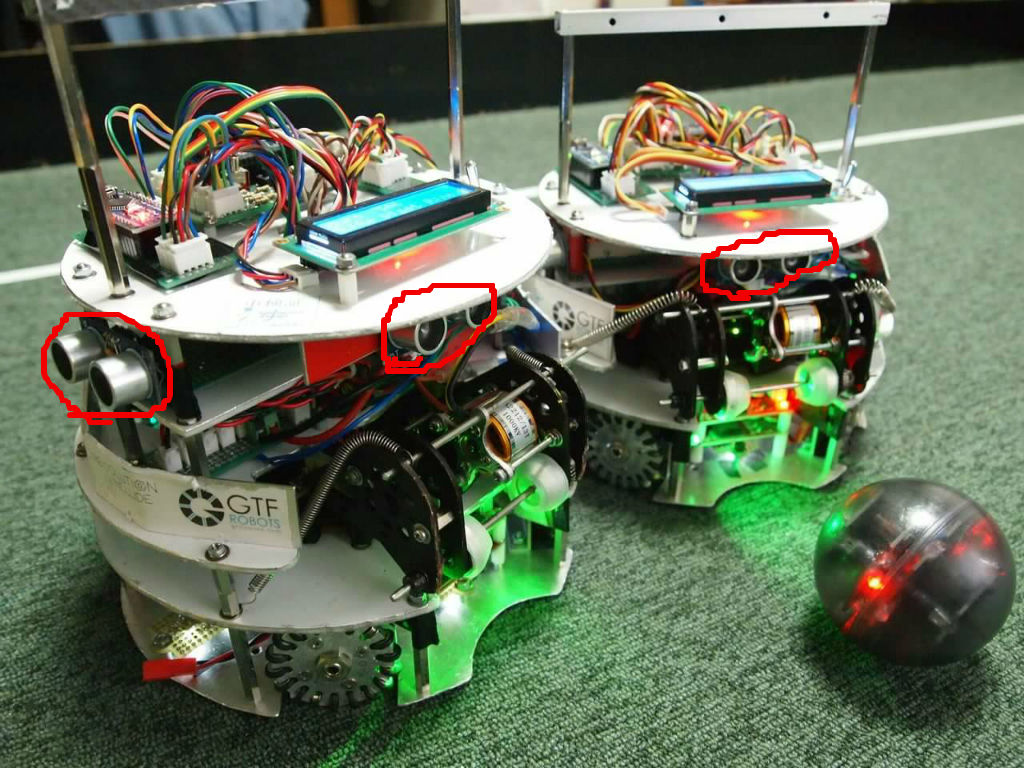
このロボットは前後左右に4つ搭載しています。
ここで小ワザを一つ。
このセンサーは元々4ピン(5V,GND,TRIG,ECHO)なのですが

この写真のようにTRIGとECHOを1kΩぐらいの抵抗でつないで、TRIGをArudinoにつなぐとなんと3ピンで運用できます。やったね、超音波センサーが増えるよ!
その場合のプログラムはこんな感じになります。
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| #define pin 10 | |
| void setup() { | |
| } | |
| void loop() { | |
| pinMode(pin, OUTPUT);//pinをアウトプットモードに | |
| digitalWrite(pin, LOW); | |
| delayMicroseconds(2); | |
| digitalWrite(pin, HIGH); | |
| delayMicroseconds(10); | |
| digitalWrite(pin, LOW);//音を発射 | |
| pinMode(pin, INPUT);//pinをインプットモードに | |
| uint16_t Distance=pulseIn(pin, HIGH,10000) / 58;//単位はセンチ | |
| } |
pinModeを変えてあげるのがキモですね。(だれか超音波センサーを8個ぐらい付けた超音波まき散らしマシンを作ってくれないかな…)
ただ、超音波センサーは距離を測定するのに時間がかかるのですこし使いづらい感じです。超音波センサー専用のArduinoを用意した方がいいと思います。
ボールキャッチセンサー
ボールキャッチセンサーはドリブラーの下についてる緑色に光っている部品と、その対角線上にある部品です。
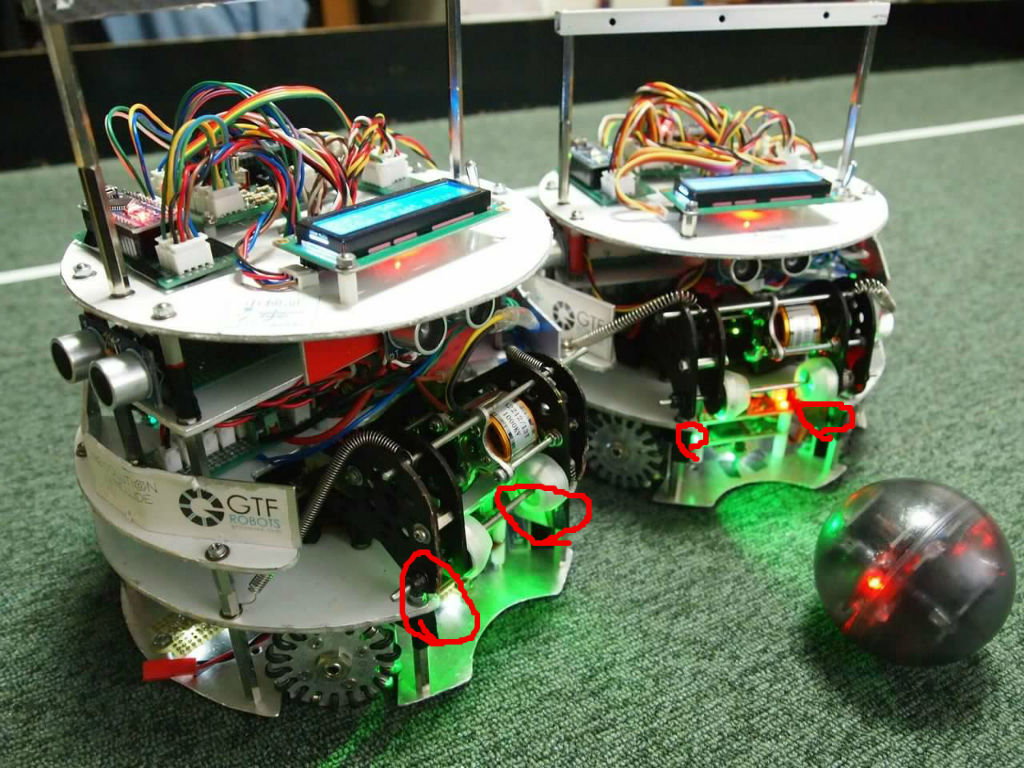
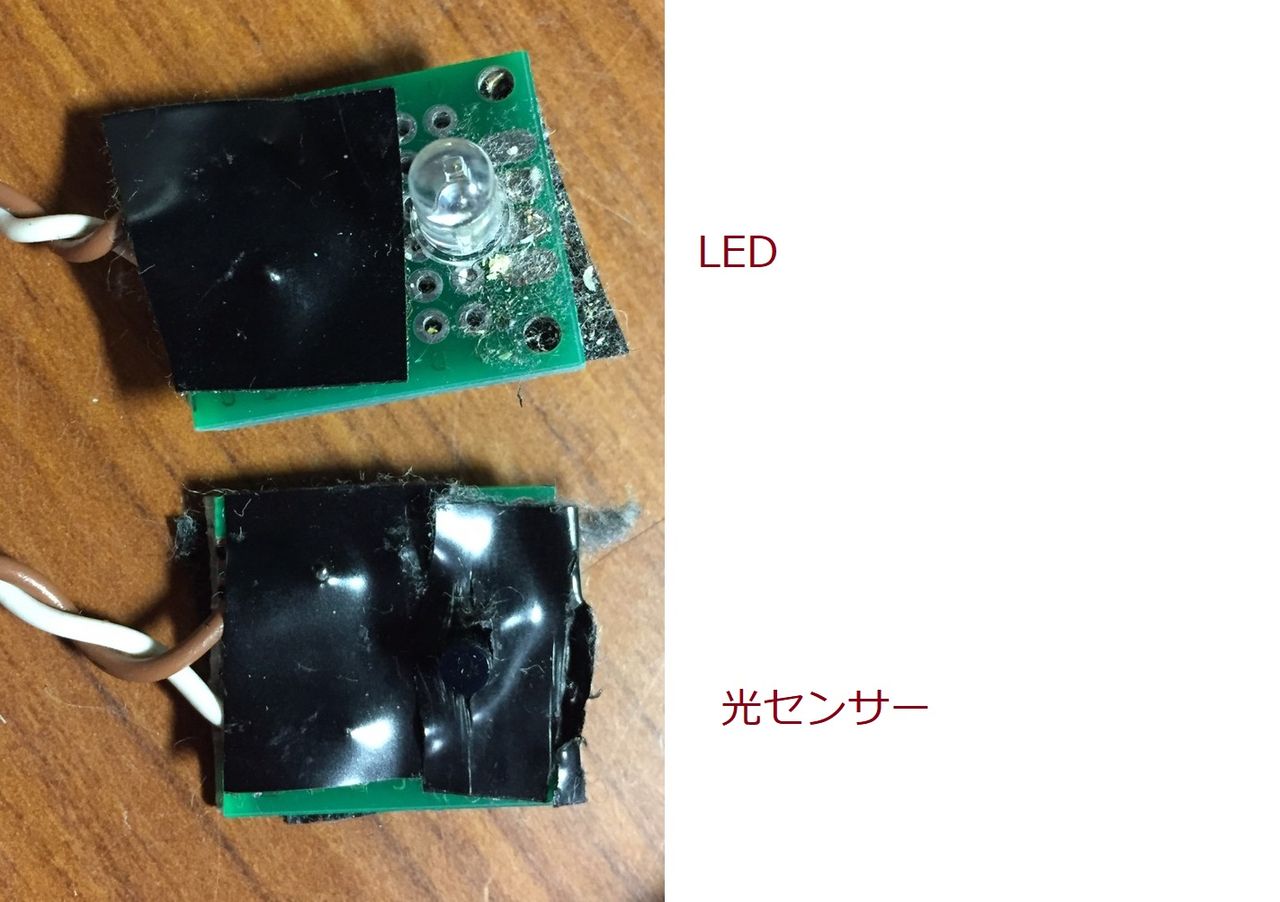
これですね。
光っている方はただのLEDで、光っていない方はラインセンサーと同じ光センサーです。
この間にボールが入ることで、LEDからの光が遮られて光センサーの値が変わるのでそれを検出します。
小さくて単純な機構ですが、これがないとバナナシュートが出来ないので大事な部品です。
まとめ
終盤息切れしてしまいました。スミマセン。余裕があったらまた追記しようかな。
- センサーの種類は意外と少ないけどそれをうまく扱うことは難しい
- ジャイロもコンパスもどっちもどっち
- ラインセンサーは最重要
- ドリブラーかキッカーを付けるなら、ボールキャッチセンサも必要
- ボールキャッチセンサの固定方法は設計段階から考えておいた方がいい
- 超音波センサーはお手軽かつ安いが、遅い
- IRセンサーはチームによって使い方がバラバラ

コメント
コメント一覧 (34)
RCJに参加しているものです。この前の中津川大会では、NSXとしてライトで出場させて頂いていました。
本題ですが、この記事に関係のないことで申し訳ないのですが、モータはpololu25Dを使用されていて、オムニホイールにはGTF Robots 50mm gradeAを使用されていますよね。
そこで、質問なのですが、次期ロボットにpololuモータを載せようと考えているのですが、オムニに何を使うか悩んでいます。使ってらっしゃるオムニは、モータにどのように固定されてますでしょうか。重さはどのぐらいでしょうか。
また、使用感を簡単にお教えいただけるとありがたいです。
制御担当の太鼓の暇人です。機械担当ではないのでちょっと詳しいことは言えないのですが返信させていただきます。
そうですね。プレゼンシートに書いていますが
モーターはPololu 25Dx50L HP 12Vの20.4 : 1
オムニはGTF Robots 50mm gradeAを使用して、4輪で出場しました。
使っているオムニはモーターの軸にイモねじで固定しています。モーターの軸はΦ4のDカットでした。イモねじだけの固定でしたが外れることはほとんどありませんでした。
このオムニはフルスチール製なのでちょっと重かったですね。ライトで出るには重さが厳しいのではないかと思います。
このオムニはにゴムがついていてさらに凹凸があるので非常にグリップ力が強かったです。モーターの力の大部分を伝えてくれていたのでほとんどのロボットに押し勝っていました。
詳しいことはまた後で機械担当が記事にする予定です。良かったらそちらも見ていってください。
参考にさせて頂きます。
またその記事を見させて頂きます。
Revolution_Includeさんではどのようにしていますか?
僕らの場合は値はかなり安定していたのでそのまま計算に使用しています。
蛍光灯の光がかなり強いノイズになっていたことがあったので、それが原因かもしれませんね。
一回部屋を暗くして使ってみたらどうなりますか?
ありがとうございます。
もう一つ質問なのですが、pulseIn関数だとボールの発光するパルスの一つ一つの間隔をみてしまうため(https://www.elekit.co.jp/pdf/RCJ05%20waveform_j.pdf)の25μsecを2で割った12.5が常に戻り値になるのでは?と思うのですが、そうはなりませんでした。なぜでしょうか?
そうでしたか。良かったです。
返り値の問題についてはよく分からないです。すみません。もしかしたらセンサーが強度→パルス幅という変換をているのかもと思いましたが、どうでしょうかね…
このセンサーはとりあえず使ってみてなんとかなったので、これ以上詳しくはちょっと分からないです。ごめんなさい。
ありがとうございます。
初心者の私にはまだわからないことだらけで大変です(汗)
そこで、一つ質問があるのですが
ジャイロの使い方、制御の仕方がイマイチ分かりません、、、
ほかのブログを読むも理解出来ずで先に進みません
お忙しいかと思いますがわかりやすくジャイロの制御について説明してもらえないでしょうか
このブログを参考にしてくださってありがとうございます。質問や指摘がありましたら遠慮無くコメントしてくださいね。
ジャイロの制御の仕方ですか…そうですね。
ちょっとコメントで書くには難しい内容なので、また今度記事にするという形で返事をさせてもらっても良いですか?ちょっと時間がかかると思いますが、その方がわかりやすい説明が出来ると思います。
そのほかのセンサーで説明してほしいセンサー等がありましたら、言ってくださいね。
記事か出来るのを楽しみに待ってます!
記事はこちらです。http://blog.livedoor.jp/revolution_include/archives/2815979.html#more
文章ばっかりで見にくくなってしまってごめんなさい。
なるべく簡単にできるように書いたつもりですが、わかりにくいところがあったらまた遠慮無くコメントくださいね!
早速コピペしてコンパイルした所
7行目の
#define Accel_Z ‐1458
で、エラーが出ました…
何故でしょうか?
>>エラーが出ました…
今さっき再コンパイルしてみたのですが、僕の環境ではエラーはでませんでした。全角スペースとか入っていませんか?もし良ければどういうエラーなのか教えてください!
exit status 1
stray '#' in program
ですね
キャリブレーションの方でも似たようなコメントが出ました…
#が全角になっていませんか?他にも全角文字がないかちょっと確認してみてください。全角文字があると出るエラーのようです。
使用しているのはArudino IDEですか?アップデートはされていますか?最新は1.8.3です。
それでもダメならコピペし直してみてもらえませんか?
MPU6050のライブラリはここでダウンロード出来ますよ。
https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050
正確にはこうでした。(長くてすみません)
Arduino:1.8.3 (Windows 7), ボード:"Arduino/Genuino Mega or Mega 2560, ATmega2560 (Mega 2560)"
sketch_jul11d:1: error: stray '#' in program
1 #include <Wire.h>
^
sketch_jul11d:2: error: stray '#' in program
2 #include <MPU6050_6Axis_MotionApps20.h>
^
sketch_jul11d:5: error: stray '#' in program
4 #define Gyro_X -1529
^
sketch_jul11d:6: error: stray '#' in program
5 #define Gyro_Y -981
^
sketch_jul11d:7: error: stray '#' in program
6 #define Gyro_Z -131
^
sketch_jul11d:8: error: stray '#' in program
7 #define Accel_Z -1458
^
sketch_jul11d:1: error: expected unqualified-id before numeric constant
1 #include <Wire.h>
^
sketch_jul11d:12: error: expected unqualified-id before numeric constant
10 static uint8_t mpuIntStatus;
^
sketch_jul11d:13: error: expected unqualified-id before numeric constant
11 static bool dmpReady = false; // set true if DMP init was successful
^
sketch_jul11d:14: error: expected unqualified-id before numeric constant
12 static uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
^
sketch_jul11d:15: error: expected unqualified-id before numeric constant
13
^
sketch_jul11d:18: error: expected unqualified-id before numeric constant
15 uint16_t fifoCount;
^
sketch_jul11d:19: error: expected unqualified-id before numeric constant
16 uint8_t fifoBuffer[64]; // FIFO storage buffer // orientation/motion vars
^
sketch_jul11d:20: error: expected unqualified-id before numeric constant
17 Quaternion q; // [w, x, y, z] quaternion container
^
sketch_jul11d:21: error: expected unqualified-id before numeric constant
18 VectorFloat gravity; // [x, y, z] gravity vector
^
sketch_jul11d:22: error: expected unqualified-id before numeric constant
19 float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
^
sketch_jul11d:23: error: expected unqualified-id before numeric constant
20
^
sketch_jul11d:25: error: expected unqualified-id before numeric constant
21 void setup() {
^
sketch_jul11d:31: error: expected unqualified-id before numeric constant
27
^
sketch_jul11d:39: error: expected unqualified-id before numeric constant
33
^
exit status 1
stray '#' in program
ほんとに長くてすいません。
ライブラリもcppやhなどの見分けがつかないので手順を詳しく教えてもらえないでしょうか?
ライブラリをダウンロードして導入してPCを再起動してみてください。
ライブラリの導入の仕方はここが詳しいです。
http://figrobo.blog.fc2.com/blog-entry-33.html
この場合はMacですが、Windowsの場合も「書類」が「ドキュメント」になるだけです。
ここを読んでも分からないようであれば教えてください。
記事に載っているプログラムはシリアルモニターでジャイロの値を出すものですが、ロボットに搭載して動かすにはどのようなプログラムになるのでしょうか?
例えば、電源を入れた向きを基準(正面)に右左それぞれ15度以内だとボールを追いかけ15度を超えると正面を向く
のような
まず、忘れないようにしておくべき事は
GyroGet()をするとGyroの値が今の角度の値になる。
という事です。これを忘れるとよく分からない動きをするようになります。どうしてもおかしい理由が分からなければ、ここを確認してみてください。
正面を定義することはGyro_Offsetという変数をうまく使うことによって簡単にすることが出来ます。
電源を入れた向きを基準にしたいということは、そこの部分を0度だか180度だかに固定してあげないといけないわけです。
Gyro_Now(ジャイロからの生の値)はジャイロセンサーの機械的な原点を元に角度を出力します。Gyro_Offsetは機械的な原点を電子的な原点からの角度に直すための値と思ったら良いでしょう。Gyro=Gyro_Now+Gyro_Offsetという関係になっているので、それをうまく使ってみてください。
ここまでで正面を電子的に定義することが出来るはずです。つまり
正面に向く=ジャイロセンサーが180度を出力するように回転する。
に考え方を変換することが出来るようになっているはずです。
>>例えば、電源を入れた向きを基準(正面)に右左それぞれ15度以内だとボールを追いかけ15度を超えると正面を向く
正面=180度なのだから、ジャイロセンサーの値が165度以下になったら左に回って、ジャイロセンサーが195度以上なら右に回る、ジャイロセンサーの値が165度以上195度以下ならボールを追うというようなプログラムを書くと良いと思います。
難しそうなことを長々と書いてしまってごめんなさい。
実はブログに書いているプログラムは去年実際に全国大会に出たロボットに搭載していたプログラムを抜き出してきた物なので、うまく使えば出来るはずですよ。頑張ってください!
あと実際はドリフトといって時間がたつと値がずれていく現象があったり、センサーの性能の限界があったりするので、気をつけてくださいね。
回路はoutピンをDigitalピンに直結ですか?それともローパスフィルタ等つけているのでしょうか?
また、ソフト上でデジタルフィルタなどを使って値を安定さしていますか?使っていますか?
よかったら教えてください。
IRセンサーは直結です。なんのフィルターも付けていません。ソフトについても同じです。
このセンサーはパルス出力なのでおそらくローパスフィルターをつけると、信号が歪んでしまうのでいいように値が出てこなくなるのではないでしょうか。
ありがとうございます。
三角関数でボールの距離と方向を求めると書いていましたが具体的にどのようなことをするんですか
すみません。コメントに1年ほど気がついておりませんでした。
今更の返信で申し訳ないです。
IRセンサーについて書いている中で一番下の画像で各センサーで1~8まで番号が振られていると思います。
その各センサーから得られた値(赤外線の強度)をX軸とY軸上に分解します。
例としてあげると、
IR1の値をXという変数に足す。
IR2の値をcos(45°)をかけてからXという変数とYという変数に足す。
IR3の値をYという変数に足す。
IR4の値をcos(45°)をかけてからXという変数から引き、Yという変数に足す。
…
これをIR8まですべて繰り返します。
そしてXとYという変数をatan2(Y,X)という風に入れます。
atan2は数学的に言うとアークタンジェントという関数になります。
”X軸Y軸の座標を入れると角度を返す”という関数です。これで角度が求まります。
次に距離を求める方法ですが、これは三平方の定理を利用して、√(X^2+Y^2)として利用しました。[cm]という単位の距離を求めることは難しいです。この値は赤外線の強度を表します。距離にほぼほぼ比例した値が出てくると思うので、それを距離の代わりに利用できます。
という感じです。画像なしでは少し理解しづらいと思いますが、数学の教科書とにらめっこしながら頑張ってみてください。
遅くなってしまって、本当にごめんなさい。