

三輪走行と二足歩行の変形が可能なロボット 2011年弟燕祭
- 匝の見聞録
- | トラックバック(0)
- | コメント(2)
10月8日、JR田町駅近くの東京工業大学付属科学技術高校の学園祭“弟燕祭”に行ってきました。“ねじ”がらみで門田先生と知り合ったのがきっかけ。高校の文化祭なんてって思ったけれど、課題研究の発表があるというので期待半分で行ってきた。
この学校、田町駅徒歩2分というか駅出たら目の前にあります。山手線直結といってもいい(笑)。
校庭のすぐわきを東海道新幹線が走り、校庭では野球禁止の表示もありました。
学園祭の名称“弟燕”は、東工大が“燕”のマークで高校が弟のようなイメージからかな。

学内をいろいろ巡っていくと結果として最後に門田先生のグループの部屋にたどりつきました。
門田先生の“ねじ”展示もすばらしい。アルミ製ねじやチタン製ねじなど変わり種も。
アルミ製ねじはメチャクチャ軽かったけれど、産業用というより研究用で軽量化を目的としているそうです。あと金メッキネジ。これはデザインだけが目的。金メッキ高いのに、こだわる人はこだわるんですね。ねじ山を作る平ダイスも置いてあった(浅井製作所さんからもらったそうで…)。
さて、ここでは課題研究「三輪走行と二足歩行の変形が可能なロボットの開発」の発表・実演。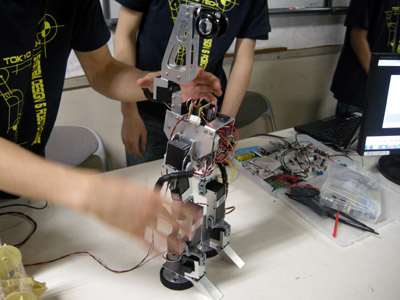
なにはともあれ、二足歩行ロボットが三輪走行ロボへと変形するところに唖然。
意表を突かれてポカーン状態で見入ってしまいました。
つまり上の写真のロボが下の写真のようになるわけです。
どういう風に変形するか気になるでしょ。
↓続きを見るならクリック
イナバウアーですよ!イナバウアー!!
聞いたところ特にこうしたかったというわけでなく、重心バランスを考えた結果このようになったと。
三輪走行モードから二足歩行モードの際に片足に重心をかけるのは、二足歩行では股が開きすぎているため両足を揃える際にこうしたらよかろうという考えからだそうです。
操縦はジョイスティックではなく、三軸加速度センサ利用のようです。
コントローラを傾けることによって前進・後進・旋回などができます。実際に操縦させてもらったら、あっという間に直感的に操縦できました。簡単でおもしろい。
写真は撮らなかったが建築デザイン分野もおもしろかった。ここだけではないが、総じて説明する生徒さんが熱心であればあるほどおもしろい。説明を聞いているとまだ高校生レベルなのでツッコミどころが随所にあるが、それでも一生懸命自分の課題について語る初々しさがたまらない。建築デザインの彼は別グループの説明も簡単にしてくれた。すばらしい。
「新しい先生は課題を自由にさせてくれるんですが、それがまた大変で…」、自由に不自由にされないように。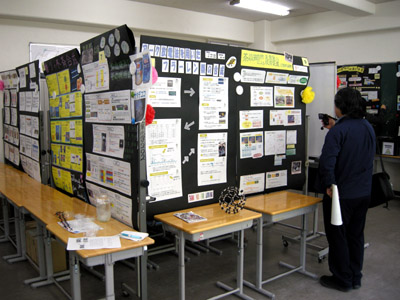
上の写真は応用化学分野の発表。
光触媒や卵殻を通したゆで卵の調味、光合成、果物のプロアテーゼなど興味深く読んできた。
なかでも珪藻と水質のポスター前には珪藻に魅せられた生徒さんの熱い説明があった。電子顕微鏡もある学校なのだから、もう少し光学顕微鏡もいいものがあれば素敵な写真が撮れるのにと個人的に残念に思う。私が珪藻土について教えてあげたおじさんです。
科学部でも珪藻の研究をしていて課題研究と合わせて一石二鳥だったようだ。本当に珪藻が好きなんですね。
「エアサスペンションにおける空気圧とその性能の関係」を発表していたグループ。真鍮でエアシリンダをつくって振動吸収の研究をしたそうだ。先輩たちの遺産を使いつつ自分たちの研究をしているらしい。縦の振動をデータ収集するのにWiiリモコンを使ったそうだ。大学はじめあちこちで大活躍だな、。Wiiリモコン。
車として旋回性能が悪いとか、車体の組み上げに苦労したとか、あちこちみると失敗の連続が…。
若いうちにたくさん失敗経験できることは大切です。
でもM10の六角穴付きボルト(鉄)をねじ切っちゃダメですよ。ねじは思いっきり締めるもんじゃないんだから(苦笑)。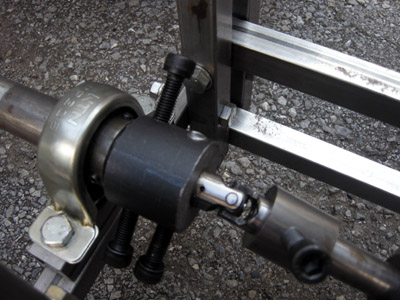
「自動車の空力特性」ではローテクぶりに痺れました。
なんらかのセンサを使ったわけではなく、風洞に入れる自動車模型の計測点に穴をあけチューブを通しガラス管上部につなげ、ガラス管は下からチューブでタンクからの水が入っている。この時、ガラス管の水位はタンクの水位に等しい。模型の穴に風で圧力がかかるとガラス管の水位は下がり、反対に穴が負圧になるとガラス管の水位が上がるという一種のピトー管だ。
データは実際の圧力値に変換せずにそのまま水位の変動幅で比較していた。こういうの好きですよ。
こちらは「自動上昇機構を搭載した水中グライダーによる滑空の長距離化」の発表。
大阪の水中ロボットの大会にも出るような話だったので「第4回水中ロボットフェスティバル」のことかもしれないな。
水中グライダーというのは個人的に興味のあるところだけれど、内部に電子制御がありながらむき出しで、しばらく本体内部を覗いてしまった。さすがにマイコン部は容器に入れてあったが…。
モータは防水モータ使用とのこと。これは覚えておこう。
聞けばグライダーの翼のところは長からずテーパ比も考慮してとむずかしいものがあるようだ(模型飛行機を設計する時も同じ悩みになるよね)。
熱心な生徒さんも、やや緊張気味な人やプレゼン向きな人、本当に好きなんだなぁと感じる人いろいろだった。これからもがんばっていけるんじゃないかな。
ただ「今後はどうなるの?」と聞くと「後継者がいない(探している)」とか「受験があるので」とか、「お金がなくて」など、もう若いのに世間様と同じようなことを言ってちゃダメじゃないか(と、心の中でつぶやく)。
課題研究は3年生の発表らしいので後輩が引き続きやるかどうかなのだろうか。
「そういう方向に進めればいいんですけど…」、悩み多き年頃のようだ。


- [2011/10/09 12:14]
- 匝の見聞録 |
- トラックバック(0) |
- コメント(2)
- この記事のURL |
- TOP ▲
トラックバック
この記事のトラックバックURL
http://eniguma.blog85.fc2.com/tb.php/2509-0be8694d
- | HOME |
プロフィール

Author:匝(めぐる)
酉年うまれの、人生振り返れば迷走の足跡だらけが目につく、神奈川在住の科学好き
634-878
匝のTwitter
最近の記事
最近のコメント
カテゴリー
- MEGURU NOTE更新情報 (3)
- 日常のこと (1098)
- 自由研究のアイデア (49)
- イモリの観察 (124)
- アクア (81)
- 地震予知を考える (59)
- 防災を考える (66)
- 匝の本棚 (104)
- 匝と小学生の質問 (6)
- 匝の食歴 (163)
- 匝の夜空 (42)
- 匝の見聞録 (91)
- 匝の衝動買い (40)
- 匝の動画 (12)
- 匝の橋物語 (4)
- 匝の線香花火 (2)
- 匝のコケ観察 (18)
- 匝のセレビシエ (19)
- 匝の花粉集め (7)
- 匝のミクロ (33)
- 匝のビオトープ (81)
- 匝のポタリング (146)
- 再読したい!「子供の実験室」 (0)
- 匝の自然観察 (134)
- 風船の科学 (3)
- 世界 (27)
- 匝となんだろう君 (6)
- 技術雑想メモ (148)
- 匝の社内菜園 (42)
- 2014/12 イタリア (1)
- 2013/9 鹿児島 (3)
- 2013/5 三陸 (2)
- 2012/11 山陰 (2)
- 2011/10 能登 (0)
- 2010/2 台湾天灯上げ (8)
- 2009/11 西安・北京 (15)
- 2009/10 龍勢祭り (7)
- 2009/9 北海道 (33)
- 2009/5 台湾一周 (25)
- 2009/5 羊山 (11)
- 2009/2 転んでも大島 (25)
- 2008/12 江ノ島 (4)
- 2008/9 四国うどんツアー (21)
- 2007/10 沖縄 (2)
- 2007/9 福島大内宿 (6)
- 2007/5 沖縄 (25)
- 工人舎SA1F (16)
- ヤゴの飼育 (8)
- Knoppix (4)
- 未分類 (26)
天気予報
最近のトラックバック
月別アーカイブ
- 2015年02月 (1)
- 2015年01月 (4)
- 2014年12月 (1)
- 2014年10月 (1)
- 2014年09月 (10)
- 2014年07月 (1)
- 2014年06月 (3)
- 2014年05月 (10)
- 2014年04月 (8)
- 2014年03月 (4)
- 2014年02月 (10)
- 2014年01月 (7)
- 2013年12月 (9)
- 2013年11月 (9)
- 2013年10月 (16)
- 2013年09月 (12)
- 2013年08月 (14)
- 2013年07月 (12)
- 2013年06月 (12)
- 2013年05月 (13)
- 2013年04月 (15)
- 2013年03月 (10)
- 2013年02月 (10)
- 2013年01月 (21)
- 2012年12月 (21)
- 2012年11月 (25)
- 2012年10月 (18)
- 2012年09月 (16)
- 2012年08月 (10)
- 2012年07月 (18)
- 2012年06月 (16)
- 2012年05月 (35)
- 2012年04月 (19)
- 2012年03月 (26)
- 2012年02月 (23)
- 2012年01月 (25)
- 2011年12月 (21)
- 2011年11月 (15)
- 2011年10月 (31)
- 2011年09月 (19)
- 2011年08月 (13)
- 2011年07月 (14)
- 2011年06月 (27)
- 2011年05月 (28)
- 2011年04月 (11)
- 2011年03月 (11)
- 2011年02月 (14)
- 2011年01月 (18)
- 2010年12月 (4)
- 2010年11月 (12)
- 2010年10月 (7)
- 2010年09月 (15)
- 2010年08月 (18)
- 2010年07月 (18)
- 2010年06月 (15)
- 2010年05月 (33)
- 2010年04月 (29)
- 2010年03月 (21)
- 2010年02月 (14)
- 2010年01月 (21)
- 2009年12月 (32)
- 2009年11月 (45)
- 2009年10月 (48)
- 2009年09月 (85)
- 2009年08月 (80)
- 2009年07月 (94)
- 2009年06月 (50)
- 2009年05月 (94)
- 2009年04月 (71)
- 2009年03月 (53)
- 2009年02月 (62)
- 2009年01月 (52)
- 2008年12月 (58)
- 2008年11月 (42)
- 2008年10月 (50)
- 2008年09月 (59)
- 2008年08月 (53)
- 2008年07月 (43)
- 2008年06月 (37)
- 2008年05月 (49)
- 2008年04月 (53)
- 2008年03月 (50)
- 2008年02月 (46)
- 2008年01月 (41)
- 2007年12月 (54)
- 2007年11月 (55)
- 2007年10月 (34)
- 2007年09月 (52)
- 2007年08月 (45)
- 2007年07月 (34)
- 2007年06月 (55)
- 2007年05月 (75)
- 2007年04月 (54)
- 2007年03月 (36)
- 2007年02月 (37)
- 2007年01月 (50)
- 2006年12月 (30)
コメントの投稿