
今回は数学でピカチュウを描いてみようと思います。
パラメトリック方程式というものを使います。
下がピカチュウの公式です。
長すぎるだろ...
計算時間もすごいです。
プログラム
import matplotlib.pyplot as plt
import numpy as np
from hmath import *
def x_(t):
return ((-1 / 4 * sin(10 / 7 - 23 * t) - 3 / 10 * sin(4 / 3 - 22 * t) - 2 / 5 * sin(7 / 5 - 19 * t) - 1 / 5 * sin(7 / 5 - 16 * t) - 3 / 7 * sin(10 / 7 - 15 * t) - 3 / 8 * sin(13 / 9 - 9 * t) - 19 / 13 * sin(11 / 7 - 3 * t) + 222 / 5 * sin(t + 11 / 7) + 41 / 2 * sin(2 * t + 11 / 7) + 34 / 9 * sin(4 * t + 11 / 7) + 1 / 3 * sin(5 * t + 8 / 5) + 3 / 8 * sin(6 * t + 8 / 5) + 12 / 7 * sin(7 * t + 13 / 8) + 11 / 7 * sin(8 * t + 13 / 8) + 1 / 4 * sin(10 * t + 20 / 13) + 2 / 9 * sin(11 * t + 16 / 9) + 3 / 8 * sin(12 * t + 8 / 5) + 1 / 3 * sin(13 * t + 7 / 4) + 1 / 2 * sin(14 * t + 17 / 10) + 5 / 7 * sin(17 * t + 17 / 10) + 1 / 28 * sin(18 * t + 9 / 2) + 1 / 2 * sin(20 * t + 12 / 7) + 3 / 7 * sin(21 * t + 16 / 9) + 6 / 11 * sin(24 * t + 7 / 4) - 979 / 9) * theta(51 * pi() - t) * theta(t - 47 * pi()) + (-6 / 5 * sin(14 / 9 - 22 * t) - 1 / 9 * sin(7 / 5 - 19 * t) - 9 / 8 * sin(14 / 9 - 18 * t) - 1 / 14 * sin(15 / 11 - 15 * t) - 6 / 5 * sin(11 / 7 - 12 * t) - 7 / 6 * sin(11 / 7 - 8 * t) - 29 / 10 * sin(11 / 7 - 6 * t) - 104 / 3 * sin(11 / 7 - 2 * t) + 415 / 18 * sin(t + 11 / 7) + 71 / 18 * sin(3 * t + 11 / 7) + 19 / 8 * sin(4 * t + 33 / 7) + 22 / 21 * sin(5 * t + 8 / 5) + 3 / 8 * sin(7 * t + 61 / 13) + 5 / 9 * sin(9 * t + 11 / 7) + 1 / 8 * sin(10 * t + 14 / 3) + 4 / 7 * sin(11 * t + 11 / 7) + 4 / 11 * sin(13 * t + 14 / 3) + 1 / 7 * sin(14 * t + 14 / 3) + 2 / 7 * sin(16 * t + 5 / 3) + 1 / 6 * sin(17 * t + 5 / 3) + 6 / 7 * sin(20 * t + 8 / 5) + 1 / 7 * sin(21 * t + 5 / 3) + 1 / 6 * sin(23 * t + 8 / 5) - 2765 / 8) * theta(47 * pi() - t) * theta(t - 43 * pi()) + (1189 / 22 * sin(t + 11 / 7) + 3 / 4 * sin(2 * t + 13 / 8) + 11 / 2 * sin(3 * t + 8 / 5) + 2 / 7 * sin(4 * t + 17 / 7) + 22 / 9 * sin(5 * t + 18 / 11) + 1 / 4 * sin(6 * t + 17 / 7) + 16 / 17 * sin(7 * t + 20 / 11) + 1 / 5 * sin(8 * t + 29 / 9) - 1627 / 7) * theta(43 * pi() - t) * theta(t - 39 * pi()) + (-3 / 7 * sin(1 / 18 - 5 * t) - 3 / 4 * sin(1 / 2 - 3 * t) + 109 / 9 * sin(t + 13 / 10) + 5 / 8 * sin(2 * t + 11 / 3) + 5 / 9 * sin(4 * t + 10 / 3) + 3 / 10 * sin(6 * t + 21 / 8) + 2 / 9 * sin(7 * t + 2 / 3) + 1 / 4 * sin(8 * t + 23 / 8) - 1190 / 9) * theta(39 * pi() - t) * theta(t - 35 * pi()) + (188 / 21 * sin(t + 27 / 28) + 2 / 5 * sin(2 * t + 17 / 6) + 2 / 3 * sin(3 * t + 91 / 23) + 3 / 8 * sin(4 * t + 53 / 18) + 2 / 11 * sin(5 * t + 1 / 7) - 369) * theta(35 * pi() - t) * theta(t - 31 * pi()) + (-8 / 9 * sin(1 / 10 - 12 * t) - 34 / 9 * sin(10 / 9 - 6 * t) - 137 / 10 * sin(5 / 7 - 2 * t) + 26 / 5 * sin(t + 13 / 4) + 118 / 5 * sin(3 * t + 11 / 8) + 43 / 8 * sin(4 * t + 13 / 7) + 49 / 6 * sin(5 * t + 11 / 12) + 22 / 5 * sin(7 * t + 13 / 4) + 17 / 16 * sin(8 * t + 1 / 7) + 5 / 4 * sin(9 * t + 1 / 4) + 5 / 7 * sin(10 * t + 17 / 5) + 29 / 15 * sin(11 * t + 5 / 6) - 1915 / 8) * theta(31 * pi() - t) * theta(t - 27 * pi()) + (-2 / 7 * sin(10 / 7 - 7 * t) - sin(1 / 27 - 4 * t) + 68 / 7 * sin(t + 44 / 15) + 76 / 9 * sin(2 * t + 37 / 10) + 30 / 7 * sin(3 * t + 1) + 8 / 9 * sin(5 * t + 3 / 2) + 4 / 5 * sin(6 * t + 31 / 8) + 3 / 7 * sin(8 * t + 10 / 3) + 6 / 13 * sin(9 * t + 8 / 7) + 1 / 3 * sin(10 * t + 31 / 9) - 2135 / 9) * theta(27 * pi() - t) * theta(t - 23 * pi()) + (-3 / 8 * sin(1 / 4 - 23 * t) - 3 / 5 * sin(1 / 8 - 22 * t) - 13 / 8 * sin(5 / 4 - 20 * t) - 9 / 7 * sin(3 / 2 - 16 * t) - 41 / 5 * sin(4 / 3 - 4 * t) + 768 / 7 * sin(t + 11 / 5) + 109 / 5 * sin(2 * t + 16 / 7) + 150 / 13 * sin(3 * t + 11 / 6) + 33 / 7 * sin(5 * t + 97 / 24) + 23 / 4 * sin(6 * t + 5 / 7) + 69 / 7 * sin(7 * t + 9 / 8) + 32 / 5 * sin(8 * t + 21 / 5) + 7 / 6 * sin(9 * t + 22 / 9) + 28 / 5 * sin(10 * t + 5 / 6) + 43 / 10 * sin(11 * t + 26 / 7) + 14 / 9 * sin(12 * t + 5 / 11) + 13 / 9 * sin(13 * t + 40 / 9) + 11 / 6 * sin(14 * t + 2 / 5) + 3 / 2 * sin(15 * t + 17 / 10) + 7 / 11 * sin(17 * t + 4 / 3) + 3 / 8 * sin(18 * t + 31 / 10) + 4 / 7 * sin(19 * t + 14 / 9) + 6 / 5 * sin(21 * t + 17 / 7) + 4 / 7 * sin(24 * t + 27 / 8) + 1006 / 11) * theta(23 * pi() - t) * theta(t - 19 * pi()) + (-63 / 8 * sin(2 / 7 - 8 * t) - 38 / 13 * sin(11 / 9 - 6 * t) - 14 / 5 * sin(1 / 17 - 4 * t) + 77 / 9 * sin(t + 1 / 2) + 52 / 7 * sin(2 * t + 10 / 3) + 22 / 9 * sin(3 * t + 76 / 17) + 21 / 8 * sin(5 * t + 26 / 7) + 3 * sin(7 * t + 15 / 8) + 64 / 7 * sin(9 * t + 57 / 14) + 6 * sin(10 * t + 17 / 6) - 544 / 7) * theta(19 * pi() - t) * theta(t - 15 * pi()) + (-37 / 10 * sin(4 / 7 - 5 * t) - 3 * sin(3 / 7 - 3 * t) + 24 / 7 * sin(t + 7 / 6) + 9 / 7 * sin(2 * t + 2 / 5) + 31 / 15 * sin(4 * t + 37 / 8) + 9 / 5 * sin(6 * t + 12 / 5) + 59 / 12 * sin(7 * t + 13 / 6) + 15 / 7 * sin(8 * t + 25 / 8) + 134 / 15 * sin(9 * t + 7 / 3) + 73 / 8 * sin(10 * t + 1 / 5) - 4406 / 11) * theta(15 * pi() - t) * theta(t - 11 * pi()) + (236 / 7 * sin(t + 6 / 5) + 1 / 2 * sin(2 * t + 47 / 12) - 627 / 5) * theta(11 * pi() - t) * theta(t - 7 * pi()) + (69 / 2 * sin(t + 5 / 6) - 715 / 2) * theta(7 * pi() - t) * theta(t - 3 * pi()) + (-19 / 9 * sin(6 / 5 - 21 * t) - 37 / 10 * sin(7 / 9 - 19 * t) - 23 / 8 * sin(1 - 17 * t) - 16 / 3 * sin(7 / 6 - 16 * t) - 29 / 5 * sin(1 / 5 - 9 * t) - 919 / 11 * sin(1 / 7 - 3 * t) + 1573 / 6 * sin(t + 91 / 45) + 214 / 5 * sin(2 * t + 33 / 8) + 421 / 14 * sin(4 * t + 13 / 8) + 61 / 6 * sin(5 * t + 19 / 5) + 401 / 16 * sin(6 * t + 43 / 14) + 511 / 51 * sin(7 * t + 35 / 8) + 144 / 7 * sin(8 * t + 5 / 6) + 137 / 10 * sin(10 * t + 25 / 13) + 18 / 7 * sin(11 * t + 15 / 7) + 17 / 9 * sin(12 * t + 41 / 9) + 9 / 7 * sin(13 * t + 13 / 7) + 29 / 10 * sin(14 * t + 22 / 7) + 25 / 8 * sin(15 * t + 1 / 4) + 12 / 5 * sin(18 * t + 11 / 8) + 14 / 5 * sin(20 * t + 27 / 7) + 13 / 8 * sin(22 * t + 12 / 7) + 7 / 6 * sin(23 * t + 7 / 9) + 26 / 11 * sin(24 * t + 23 / 7) - 1891 / 8) * theta(3 * pi() - t) * theta(t + pi())) * theta(abs(sqrt(sign(sin(t / 2)))))
def y_(t):
return ((-8 / 11 * sin(11 / 8 - 22 * t) - 1 / 2 * sin(10 / 7 - 21 * t) + 67 / 6 * sin(t + 33 / 7) + 1478 / 29 * sin(2 * t + 11 / 7) + 3 / 5 * sin(3 * t + 30 / 7) + 26 / 3 * sin(4 * t + 11 / 7) + 1 / 6 * sin(5 * t + 13 / 9) + 30 / 29 * sin(6 * t + 8 / 5) + 2 / 5 * sin(7 * t + 14 / 3) + 88 / 29 * sin(8 * t + 8 / 5) + 1 / 4 * sin(9 * t + 31 / 7) + 11 / 8 * sin(10 * t + 8 / 5) + 1 / 16 * sin(11 * t + 9 / 2) + 1 / 12 * sin(12 * t + 5 / 4) + 1 / 10 * sin(13 * t + 25 / 11) + 11 / 8 * sin(14 * t + 18 / 11) + 2 / 7 * sin(15 * t + 37 / 8) + 1 / 6 * sin(16 * t + 11 / 8) + 2 / 9 * sin(17 * t + 5 / 3) + 1 / 5 * sin(18 * t + 17 / 10) + 1 / 13 * sin(19 * t + 19 / 8) + 23 / 24 * sin(20 * t + 12 / 7) + 7 / 11 * sin(23 * t + 9 / 5) + 9 / 7 * sin(24 * t + 7 / 4) - 1538 / 7) * theta(51 * pi() - t) * theta(t - 47 * pi()) + (-2 / 7 * sin(20 / 13 - 23 * t) - 1 / 6 * sin(3 / 2 - 20 * t) - 5 / 7 * sin(20 / 13 - 17 * t) - 1 / 9 * sin(20 / 13 - 11 * t) - 1 / 6 * sin(13 / 9 - 9 * t) - 19 / 6 * sin(17 / 11 - 3 * t) + 263 / 5 * sin(t + 11 / 7) + 614 / 15 * sin(2 * t + 11 / 7) + 87 / 10 * sin(4 * t + 11 / 7) + 1 / 7 * sin(5 * t + 11 / 8) + 19 / 11 * sin(6 * t + 11 / 7) + 7 / 5 * sin(7 * t + 11 / 7) + 4 / 3 * sin(8 * t + 8 / 5) + 9 / 5 * sin(10 * t + 14 / 9) + 4 / 7 * sin(12 * t + 8 / 5) + 3 / 11 * sin(13 * t + 3 / 2) + 1 / 8 * sin(14 * t + 22 / 15) + 1 / 9 * sin(15 * t + 12 / 7) + 6 / 5 * sin(16 * t + 11 / 7) + 2 / 9 * sin(18 * t + 11 / 7) + 3 / 5 * sin(19 * t + 8 / 5) + 1 / 26 * sin(21 * t + 15 / 11) + 6 / 7 * sin(22 * t + 8 / 5) - 1867 / 8) * theta(47 * pi() - t) * theta(t - 43 * pi()) + (118 / 39 * sin(t + 11 / 7) + 40 / 7 * sin(2 * t + 33 / 7) + 49 / 25 * sin(3 * t + 14 / 3) + 12 / 5 * sin(4 * t + 8 / 5) + 1 / 9 * sin(5 * t + 32 / 13) + 5 / 2 * sin(6 * t + 13 / 8) + 2 / 5 * sin(7 * t + 22 / 5) + 3 / 4 * sin(8 * t + 7 / 4) - 143 / 10) * theta(43 * pi() - t) * theta(t - 39 * pi()) + (-1 / 8 * sin(2 / 3 - 8 * t) - 1 / 2 * sin(7 / 5 - 2 * t) - 246 / 19 * sin(1 / 7 - t) + 1 / 4 * sin(3 * t + 33 / 16) + 1 / 6 * sin(4 * t + 17 / 6) + 1 / 5 * sin(5 * t + 31 / 7) + 1 / 11 * sin(6 * t + 50 / 17) + 1 / 8 * sin(7 * t + 30 / 7) + 665 / 6) * theta(39 * pi() - t) * theta(t - 35 * pi()) + (-119 / 10 * sin(7 / 15 - t) + 2 / 11 * sin(2 * t + 25 / 7) + 2 / 9 * sin(3 * t + 5 / 8) + 1 / 5 * sin(4 * t + 33 / 7) + 1 / 4 * sin(5 * t + 19 / 10) + 1023 / 10) * theta(35 * pi() - t) * theta(t - 31 * pi()) + (-1 / 7 * sin(2 / 7 - 12 * t) - 1 / 8 * sin(3 / 10 - 5 * t) + 25 / 7 * sin(t + 77 / 17) + 355 / 59 * sin(2 * t + 41 / 40) + 27 / 5 * sin(3 * t + 46 / 15) + 33 / 7 * sin(4 * t + 11 / 3) + 27 / 10 * sin(6 * t + 13 / 9) + 5 / 11 * sin(7 * t + 11 / 5) + 5 / 8 * sin(8 * t + 3) + 8 / 5 * sin(9 * t + 16 / 15) + 16 / 15 * sin(10 * t + 1 / 7) + 7 / 9 * sin(11 * t + 12 / 5) - 862 / 7) * theta(31 * pi() - t) * theta(t - 27 * pi()) + (-1 / 3 * sin(5 / 4 - 8 * t) - 2 / 5 * sin(5 / 9 - 7 * t) - 5 / 7 * sin(11 / 8 - 5 * t) - 7 / 2 * sin(15 / 14 - 2 * t) + 29 / 8 * sin(t + 41 / 10) + 11 / 6 * sin(3 * t + 13 / 3) + 7 / 6 * sin(4 * t + 1 / 27) + 2 / 7 * sin(6 * t + 8 / 7) + 1 / 9 * sin(9 * t + 9 / 5) + 2 / 7 * sin(10 * t + 1 / 10) + 201 / 5) * theta(27 * pi() - t) * theta(t - 23 * pi()) + (-4 / 11 * sin(8 / 9 - 12 * t) - 10 / 7 * sin(19 / 13 - 10 * t) + 623 / 3 * sin(t + 10 / 7) + 39 / 5 * sin(2 * t + 10 / 11) + 251 / 9 * sin(3 * t + 4 / 3) + 5 / 7 * sin(4 * t + 4 / 3) + 61 / 6 * sin(5 * t + 4 / 3) + 14 / 9 * sin(6 * t + 23 / 7) + 76 / 25 * sin(7 * t + 9 / 7) + 3 / 4 * sin(8 * t + 1 / 4) + 19 / 5 * sin(9 * t + 3 / 2) + 17 / 6 * sin(11 * t + 6 / 5) + 13 / 8 * sin(13 * t + 14 / 13) + 8 / 9 * sin(14 * t + 17 / 6) + 24 / 25 * sin(15 * t + 1 / 2) + 1 / 6 * sin(16 * t + 13 / 8) + 5 / 8 * sin(17 * t + 1) + 1 / 7 * sin(18 * t + 18 / 17) + 6 / 7 * sin(19 * t + 1) + 1 / 4 * sin(20 * t + 4 / 9) + 2 / 7 * sin(21 * t + 7 / 5) + 1 / 3 * sin(22 * t + 8 / 7) + 2 / 5 * sin(23 * t + 1 / 26) + 2 / 11 * sin(24 * t + 8 / 7) - 243 / 8) * theta(23 * pi() - t) * theta(t - 19 * pi()) + (-111 / 10 * sin(4 / 5 - 9 * t) - 12 / 5 * sin(7 / 13 - 2 * t) + 1 / 6 * sin(t + 48 / 11) + 13 / 8 * sin(3 * t + 27 / 7) + 71 / 24 * sin(4 * t + 6 / 11) + 22 / 9 * sin(5 * t + 7 / 2) + 19 / 7 * sin(6 * t + 8 / 17) + 20 / 7 * sin(7 * t + 34 / 9) + 55 / 7 * sin(8 * t + 6 / 5) + 64 / 9 * sin(10 * t + 38 / 9) + 27 / 5) * theta(19 * pi() - t) * theta(t - 15 * pi()) + (-22 / 7 * sin(4 / 3 - 8 * t) - 19 / 7 * sin(20 / 13 - 6 * t) + 38 / 13 * sin(t + 1 / 24) + 12 / 11 * sin(2 * t + 5 / 9) + 26 / 7 * sin(3 * t + 7 / 9) + 11 / 5 * sin(4 * t + 12 / 11) + 37 / 10 * sin(5 * t + 17 / 10) + 51 / 10 * sin(7 * t + 10 / 3) + 33 / 4 * sin(9 * t + 26 / 7) + 41 / 5 * sin(10 * t + 9 / 5) - 27 / 2) * theta(15 * pi() - t) * theta(t - 11 * pi()) + (-172 / 5 * sin(3 / 8 - t) + 5 / 4 * sin(2 * t + 7 / 2) + 2303 / 24) * theta(11 * pi() - t) * theta(t - 7 * pi()) + (441 / 5 - 455 / 12 * sin(7 / 9 - t)) * theta(7 * pi() - t) * theta(t - 3 * pi()) + (-1 / 3 * sin(1 / 20 - 18 * t) - 7 / 5 * sin(7 / 9 - 17 * t) - 18 / 11 * sin(2 / 5 - 14 * t) - 24 / 5 * sin(1 / 13 - 9 * t) + 2767 / 7 * sin(t + 11 / 3) + 229 / 5 * sin(2 * t + 17 / 7) + 313 / 8 * sin(3 * t + 22 / 5) + 32 / 3 * sin(4 * t + 22 / 5) + 169 / 6 * sin(5 * t + 21 / 8) + 23 / 7 * sin(6 * t + 26 / 11) + 21 / 2 * sin(7 * t + 5 / 6) + 55 / 6 * sin(8 * t + 14 / 5) + 212 / 13 * sin(10 * t + 24 / 7) + 26 / 9 * sin(11 * t + 9 / 2) + 16 / 5 * sin(12 * t + 25 / 6) + 35 / 17 * sin(13 * t + 4 / 11) + 15 / 8 * sin(15 * t + 7 / 10) + 2 / 3 * sin(16 * t + 20 / 9) + 16 / 7 * sin(19 * t + 4 / 5) + 13 / 7 * sin(20 * t + 29 / 7) + 14 / 3 * sin(21 * t + 7 / 5) + 4 / 3 * sin(22 * t + 7 / 4) + 12 / 7 * sin(23 * t + 34 / 33) + 7 / 4 * sin(24 * t + 27 / 7) - 211 / 5) * theta(3 * pi() - t) * theta(t + pi())) * theta(abs(sqrt(sign(sin(t / 2)))))
fig = plt.figure()
ax1 = fig.add_subplot(111)
plt.xlim(-600,300)
plt.ylim(-500,500)
plt.xlabel('x')
plt.ylabel('y')
a_x = []
a_y = []
for x in range(1, 1633):
a_x += [x_(x / 10)]
a_y += [y_(x / 10)]
plt.plot(a_x, a_y, '.', markersize=5)
plt.show()
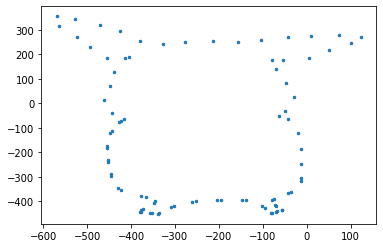
途中はこんな感じ
そして何時間もかかった計算の末...
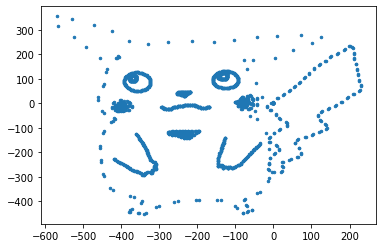
疲れた。
LGTMお願いします!!




コメント