|
|
Paper Robot
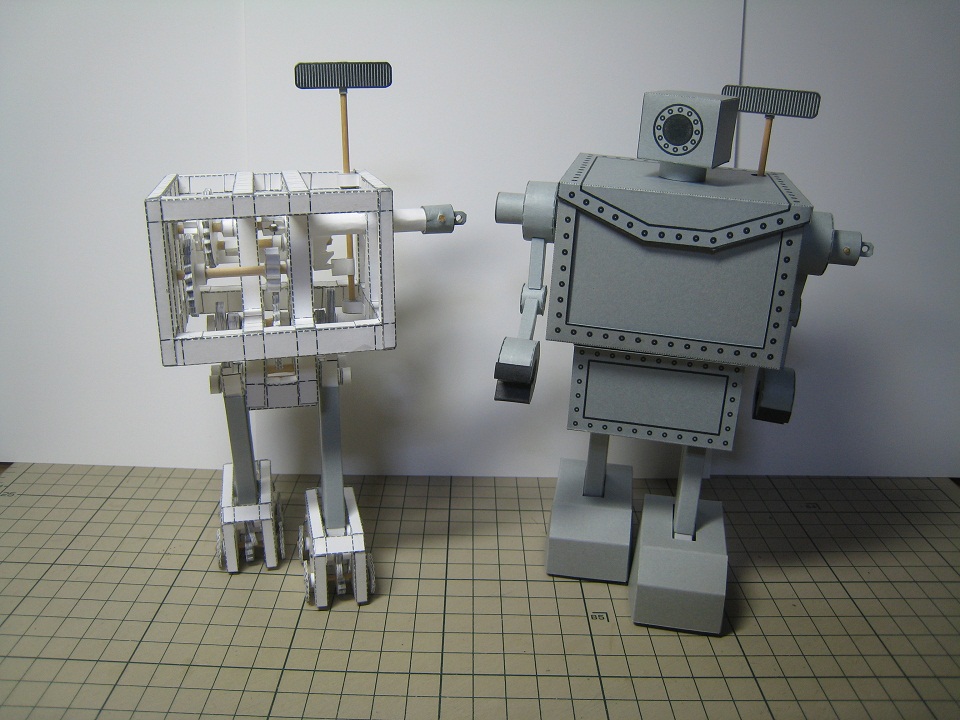
ペーパーロボットPR-Ⅰは、自分の物づくりの原点に立ち戻ってみようという思いから作り始めました。それは自分が子供の頃空箱を貼り合せただけでロボットと呼んでいたもの、つまり「空箱のロボット」を歩かせてみようということからでした。
その為、ボディとなる空箱のサイズに機構を詰め込んだ為 作り難い面もありPR-Ⅱでは一回り大きいサイズとし、メカも動作の確実性を増すように一部改良しました。しかしこれにより負荷が大きくなり、かえって動作が不安定になってしまいました。
そこで再度基本の仕様に立ち戻り、メカを必要最小限に単純化し、動力ゴムも割り切って最短の長さに設定して負荷を削減したのがPR-Ⅲです。負荷を減らし動作が軽快になった分ゴム動力が弱くなっても動作し、歩行数ものびました。自分なりにも納得できるレベルとなり今回有料配布することを決めました。
Mechanism
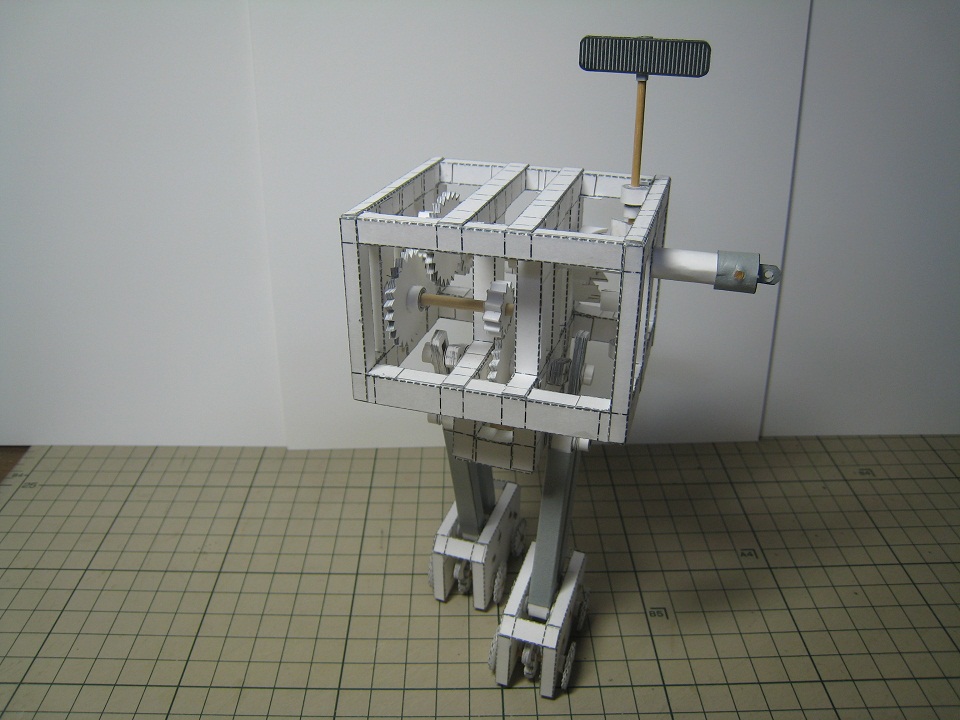
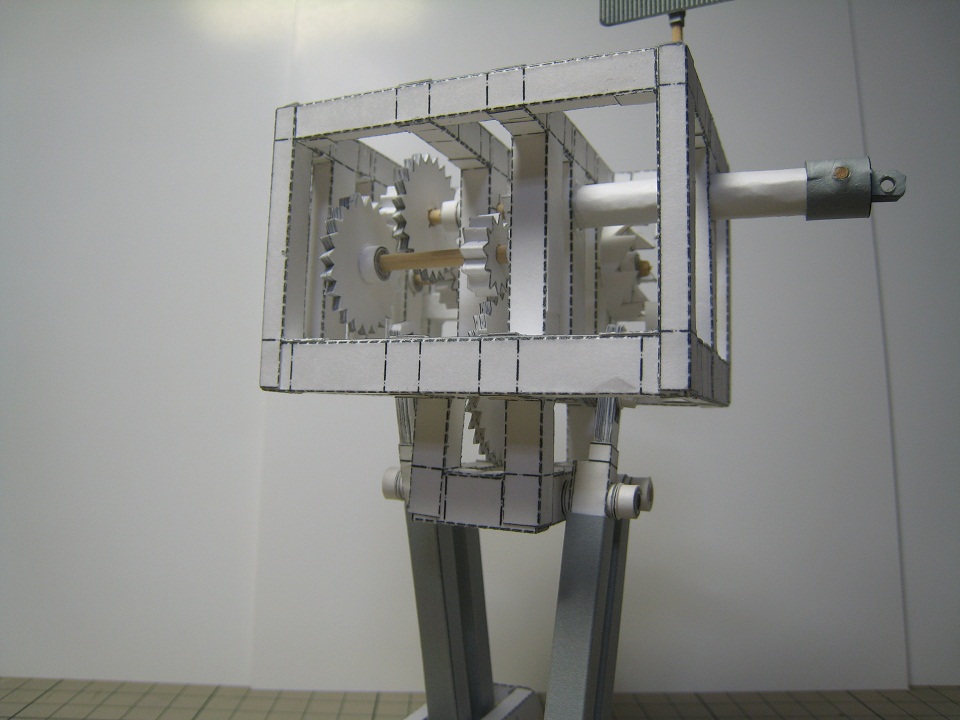
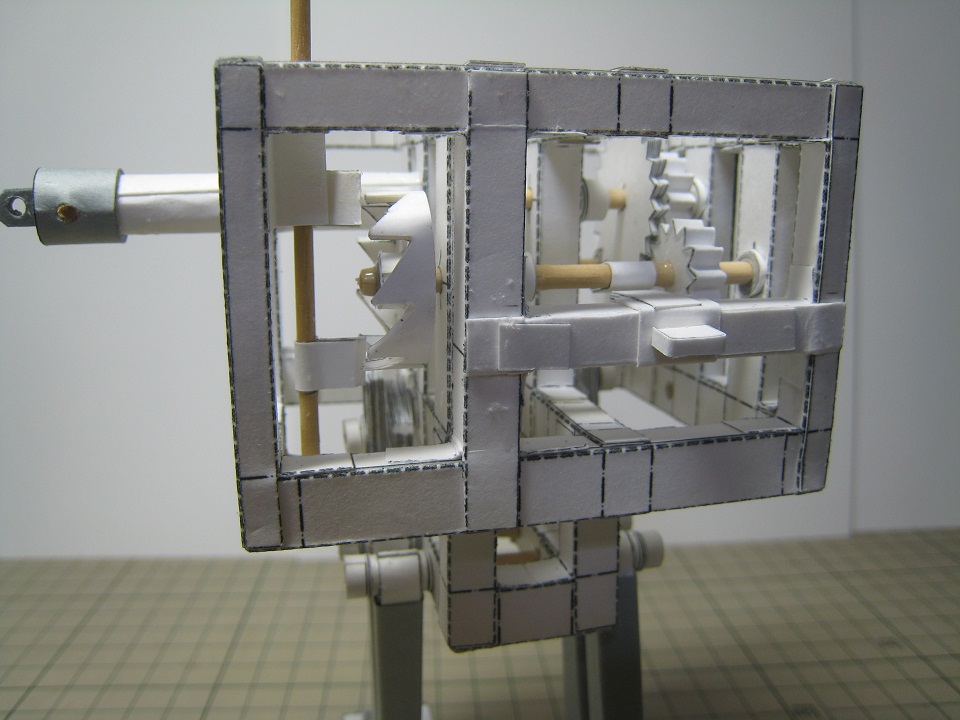
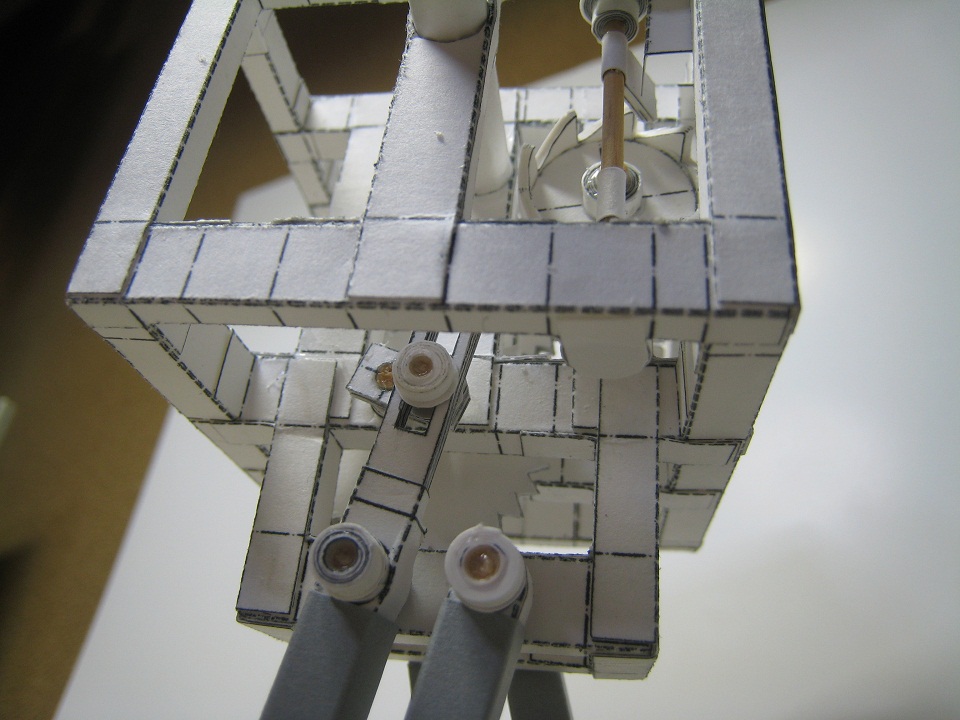
動力は、腕取付け部のパイプに内蔵されている糸ゴムのねじりによる弾性力を利用し、2段のギアを介して減速して脚部を動かすクランクを駆動しています。
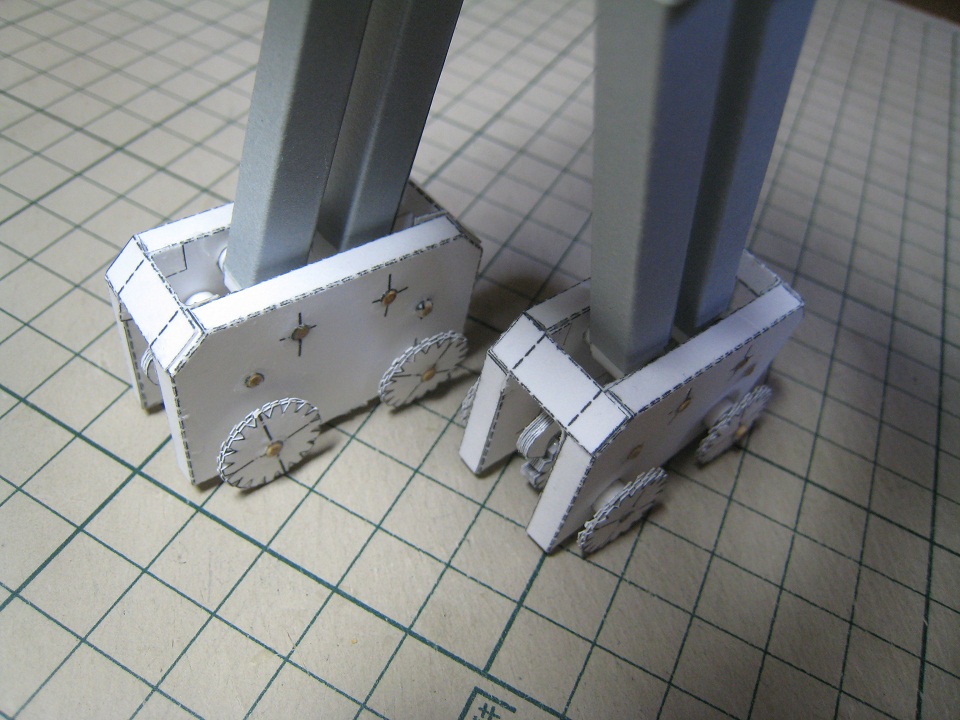
脚部は、クランク機構により交互に前方に振り出されますが、平行リンクとなっており足部の底面は常に床面と平行に移動する構造となっています。その足部底面にラチェット付で一方向にしか回転しない車輪を組み込むことにより、前方に足部が移動するときは車輪が回転して前方に進み、逆動作の時は、車輪は回転せず動かなあいので、そこが支点となってもう一方の足が前方に振り出されてロボットが前に歩く動作となります。
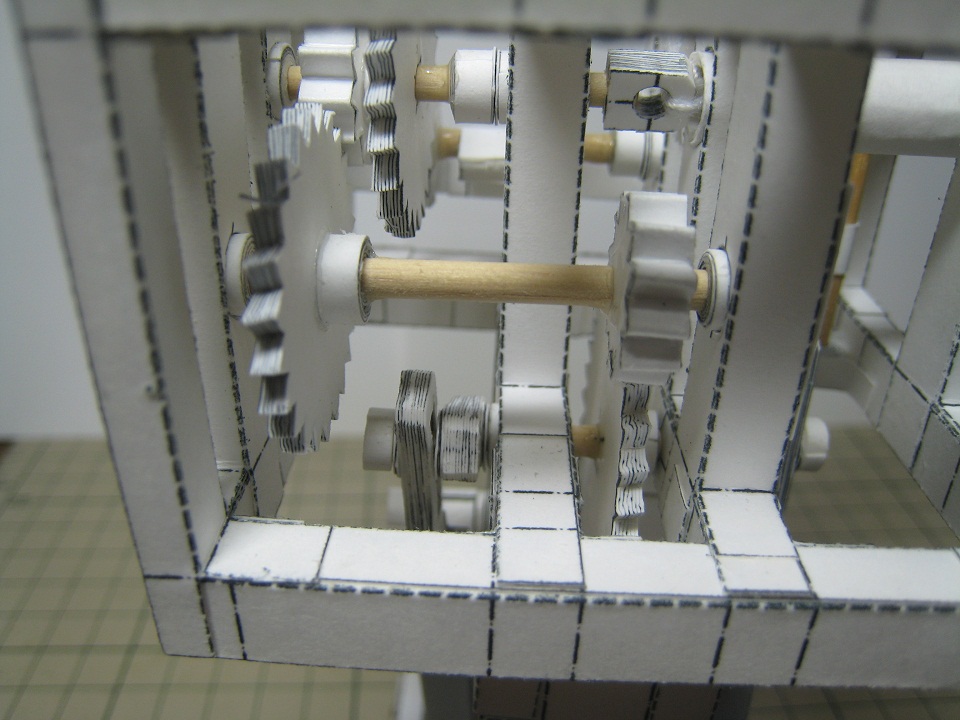
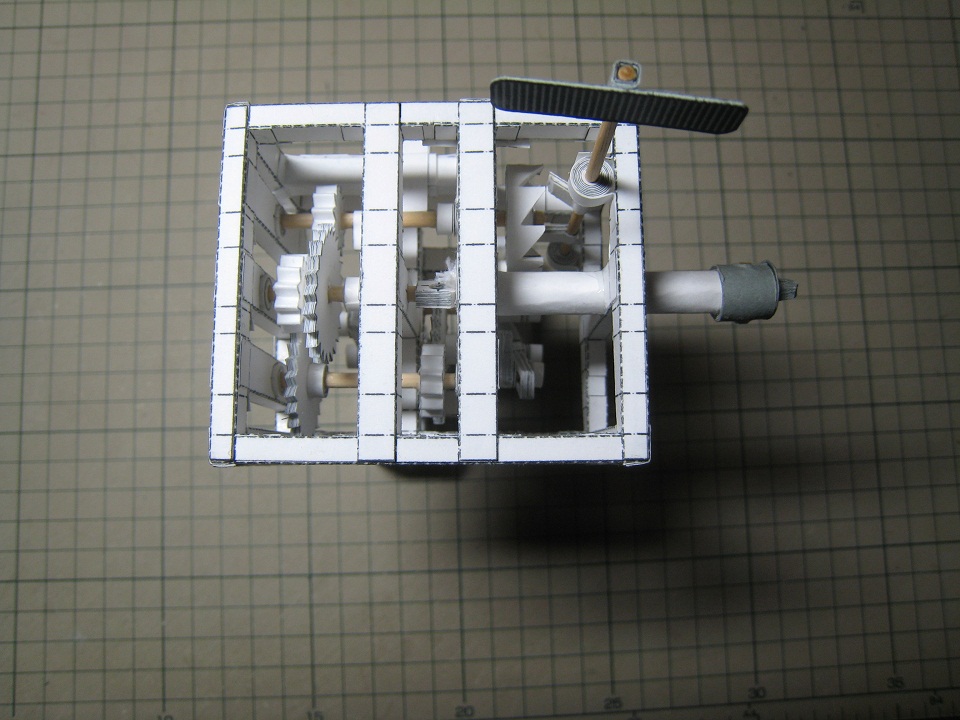
一方ロボットが歩くスピードは、駆動軸から取り出した回転をギアで増速させてガンギ車を回転させ、天符のかかりはずれ動作により天符の慣性で調速する脱進式の調速機構で一定のスピードにしています。
とは言え、材料が紙のため天候等(特に湿度)によって影響を受ける場合もあります。PR-Ⅲにおいてギアのかみ合い等は 問題ないと思われますが、ガンギ車と天符の爪の掛り外れ等においては日々状況が変わる場合もあります。
このようにペーパーロボットは、ある意味 負荷と動力の微妙なバランスの上に成り立っているとも言えるわけで、製作していただくにあたっては、この点にも十分留意していただく必要があります。 |
|
|
|
|
|
|
|
Photo (画像をクリックすると拡大画像が見られます) |
|
|
|
 |
|
 |
|
 |
|
 |
|
|
|
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
|
|
|
|
|
|
|
|
|
|
Movie (画像をクリックすると動画が見られます) |
|
|
|
 |
|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
PR-Ⅲ製作の全工程を動画化してみました。ちょっと長め(3分54秒)ですが、Paper Robot の全貌が解っていただけると思います。 |
|
|
|

|
|
|
|
|
|
|
|
Goods |
|
|
|
作品の販売にあたっては、CD-Rによるデータ形式と必要な材料を添付したキットを用意しています。 |
|
|
|
CD-R
原寸図(2枚)、型紙(6枚)、組立説明書(47ページ)をpdf化したデーターと、組立動作確認の参考用の9つの動画データーとなっています。
Sampleをクリックしていただくと各データのサンプルを見ることができます。
製作にあたっては、pdfデータを閲覧するためのPC環境と、原寸図および型紙データをケント紙(厚紙)に印刷する為のプリンター等の環境が必要になります。また動画を見るには、Windows Media Player等の動画ソフトが必要です。
一方製作のための材料としては、ケント紙4枚(メカ部品用)、カラーケント紙2枚(ボディ用、ボディ用のデータには着色してありません)、動力用糸ゴム(輪ゴム等でも代用可)、回転軸用丸棒φ2mm、φ3mm(長さ各500mm程度)、及び縫い糸等が必要となります。 |
|
|
|
Kit
キットには、上記CD-Rに加え、印刷済みの原寸図、型紙(ケント紙4枚、カラーケント紙2枚)と製作に必要な動力用糸ゴム1m、回転軸用丸棒φ2mmとφ3mm(長さ各500mm程度)、及び縫い糸1mをセットしたものとなります。ただし組立説明書は、pdfデータのみとなりますので、pdfデータを閲覧するためのPC環境が必要となります。 |
|
|
|
 |
|
|
|
購入希望の方はMENUEへ。 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|