| | 第1部 センサ部品 活用編
【加速度センサ基礎編】
第1章
距離/速度/傾斜角/衝撃/振動/周波数...マイコンに付け足してレベルアップ!
動きセンシングの超定番! 加速度センサの基礎
| pp.44-50
| 
| 【参考資料】
●シロアリの音(元ネタ)
●シロアリの出す音(葉)
◆ヘッド・バンギング(日本人)
◆コンサートの「縦ノリ」で周辺の住宅が揺れる 縦ノリ編
|
| | 【I2C直交3軸加速度センサ】
第2章
市販モジュールで試してわかる! 通信/設定/読み出しの基本
動きセンシングの超定番! 加速度センサの使い方
| pp.51-56
|
| 【過去記事】トラ技2007年12月号
『GPS+赤外線脈波+3軸加速度センサでジョギング・モニタ』
【サンプル・プログラム】
『FT232RでI2Cインターフェースを構成して3軸加速度センサKXTI9-1001に接続』
|
| | 【SAS(睡眠時無呼吸症候群) いびきと呼吸編】
Appendix 1
温度センサ&マイクで呼吸を測る
| pp.67-69
| | 【サンプル・プログラム】
『いびきと鼻呼吸を記録』
|
| | 【GPSセンサとGoogle Map編】
Appendix 2
GPS×地図でセンサ・データをレベルアップ!
【Google Maps API v3の使い方】(4サンプル有り)New
Google Maps API Version3.0の使い方についてサンプルがあります。
【GoogleMap応用例】
★当サイトでは自作ソフトでアクセス解析を行っています。[Google Maps API ver.3.0]
『ムカデに刺されたら...』のページの解析事例を示します。
【Bigデータ】『ムカデ被害日本地図』のインデックスページです。
『ムカデ治療アクセス解析2012年10月』(12464点)
『ムカデ治療アクセス解析2012年12月』(1369点)
地図左下のボタンをクリックすると地図を表示。詳細はJavaScript参照。
表示点数が多いと実行には分単位の時間がかかります。
| pp.70-73
| | 【過去記事】トラ技2007年12月号
『GPS+赤外線脈波+3軸加速度センサでジョギング・モニタ』
【Google Maps APIの使い方】
【サンプル・プログラム】
『FT232RでGPSの吐き出すデータを記録』
『GPSの緯度・経度データを地図上に表示する』
|
| | 第2部 カメラを使って動きを検出編
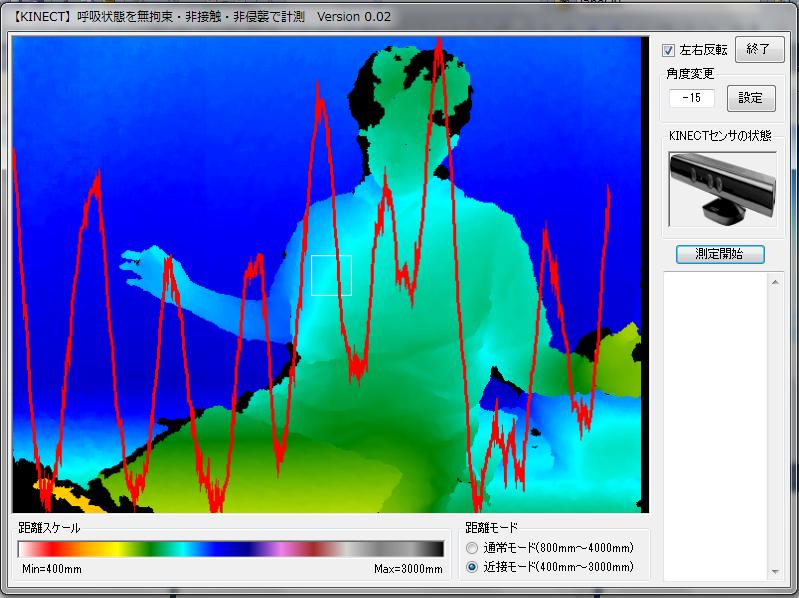
【Kinect編】『非接触 呼吸モニタ』
第6章
2m離れた対象との距離を精度1mm以下で! 奥行きカメラKinectの性能を高めるための信号処理
研究! 非接触でヒトの息づかいを測る
【備考】最新版では、赤外線ランダム・ドット・パターン投影と赤外線カメラでヘモグロビンの赤外線吸光特性を利用して赤外線強度の変動から脈波を非接触センシング、デプスカメラを利用して呼吸をモニタすることに40~50cmの距離で成功しています。
今後、パルスオキシドメータ(血中溶存酸素濃度モニタ)や赤外線血糖計、放射温度計の機能を加えた非接触・無拘束・非侵襲多機能人間モニタリングへの応用展開が考えられます。
| pp.98-105
|
| 【サンプル・プログラム】
『Kinect非接触脈拍・呼吸モニタv5』
『Kinect非接触脈拍・呼吸モニタv3』
『Kinectによる非接触呼吸モニタ』
『Kinectデプスカメラ(SDK Ver.1.6)』
【動画】
●【脈波・呼吸非接触モニタ】New
▼【Kinectで赤外線脈波(顔)】
▼【Kinectで赤外線脈波(掌)】
▼【Kinectで非接触呼吸モニタ】
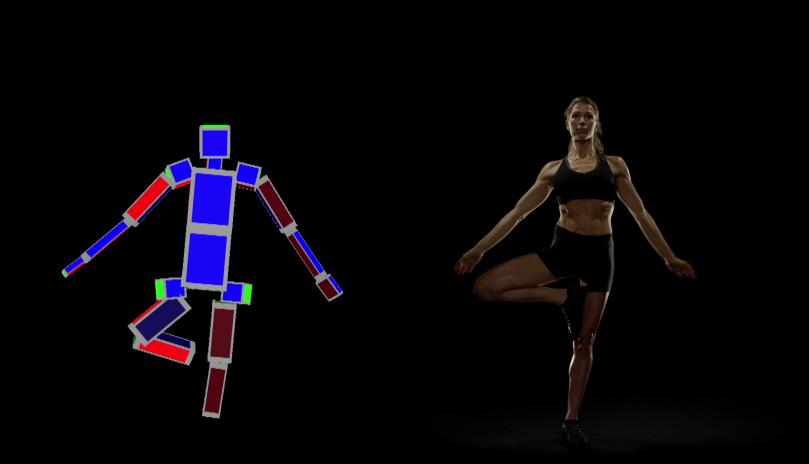
●【Kinectで人間センシング】New
●【Kinectのデプス測定範囲】New
|
| | 【Kinect編】『バーチャル・ピアノ(ドラム)』
第7章
チカチカ点滅する照明の影響を信号処理で低減!
手の位置と叩いた瞬間を検出! バーチャル・ピアノの製作
| pp.106-108
|
| 【サンプル・プログラム】
『Excel VBAでエレクトーン風のWave File(*.wav)を作成』
『Kinectによる拡張現実楽器演奏システムの簡易体験版』(加速度センサ無し)[デバッグモードでは使用不可]
【参考】DDS方式Web Vocaloid
|
| | 【Kinect編】『赤外線近接センサ 簡易NUI』
第8章
赤外線映像の新しい活用法を探る
研究! 15~50cmの至近距離でジェスチャ検出
| pp.109-113
|
| 【サンプル・プログラム】
『Kinectによる近接位置での手操作のデモを行う』
(NUI: Natural User Interface)
|
| | 第3部 直接人間センシング編
【心電計編】(無拘束で入浴中の心電図を観測する浴槽心電計を含む)
第9章
微小な生体信号をとり出すにはアナログ回路とノイズ低減信号処理がカギ
心電計に学ぶ! 医療/ヘルスケア装置づくりの勘どころ
| pp.114-126
|
| 【サンプル・プログラム】
『Excel VBAで心電図データを処理(リアルタイム処理向け)』
【旧ドキュメント残骸エントリ】
古い『心電計の製作』関連記事
【過去記事】トラ技2006年1月号
『心電計の製作』関連資料
|
| |
★Kinectの基本的なサンプルプログラムも本ページ内でダウンロードすることができます。
(詳細はトランジスタ技術2012年8月号を参照してください。)
【Kinect for Windows SDK Ver.1.6】『サンプル・プログラム集』【ダウンロード・サービス】
|

























 顔・胸部追尾
顔・胸部追尾 測定中
測定中 分厚い布団の上からでも体に密着させれば呼吸センシング可能
分厚い布団の上からでも体に密着させれば呼吸センシング可能