内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)「タフ・ロボティクス・チャレンジ」は、水を噴射して空を飛ぶ消火ロボット「ドラゴンファイヤーファイター」のプロトタイプを開発したと発表して記者会見を行った。(画像・動画はいずれも東北大学田所研究室提供)
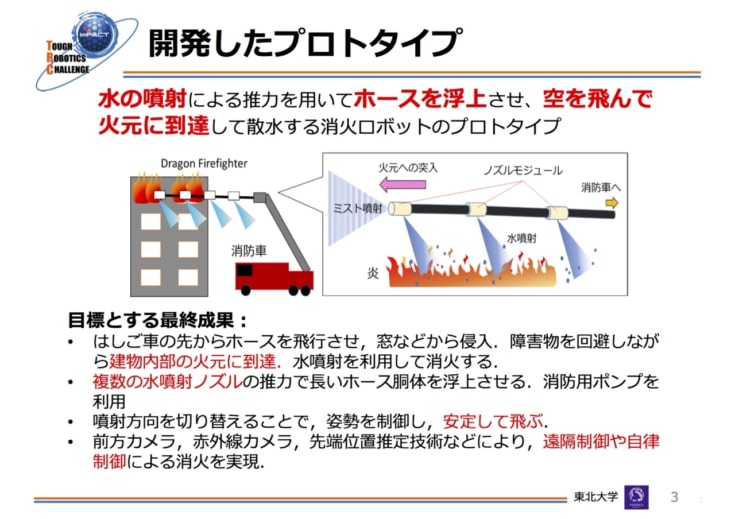
複数のノズルから水を噴射して、その推力で浮上する。はしご車の先に取り付けて用いることをイメージしており、消防士が入れない倉庫内部や高層ビルなどの屋内に突入して火元を直接消火できるという。姿勢は噴射方向を切り替えることで制御する。5月31日から東京ビッグサイトで開催される「東京国際消防防災展」にて静展示される。
開発したのは、東北大学の田所諭教授、昆陽雅司准教授、多田隈建二郎准教授、安部祐一助教、福島ハイテクプラザ主任研究員で社会人博士課程の安藤久人氏、八戸工業高等専門学校の圓山重直校長、国際レスキューシステム研究機構らのグループ。
ImPACT「タフ・ロボティクス・チャレンジ」とは
革新的研究開発推進プログラム(ImPACT)プログラム・マネージャー、東北大学大学院 情報科学研究科 教授の田所諭氏
革新的研究開発推進プログラム(ImPACT)プログラム・マネージャー、東北大学大学院 情報科学研究科 教授の田所諭氏は「近年起きている火災に対して大きなソリューションを与えられる可能性がある」と述べた。「タフ・ロボティクス・チャレンジ」はロボット技術が十分に機能を発揮できる条件をなるべく少なくすることを目指したプロジェクト。様々な災害現場の課題を解決することを目指して、開発を続けてきた。
ImPACT「タフ・ロボティクス・チャレンジ」の成果の一部
なお、ImPACT「タフ・ロボティクス・チャレンジ」の「公開フィールド評価会」が2018年6月14日に、福島県南相馬市にある「福島ロボットテストフィールド」で行われる予定だ。
水を操って宙に浮く「ドラゴンファイヤーファイター」
東北大学大学院 情報科学研究科 准教授 昆陽雅司氏
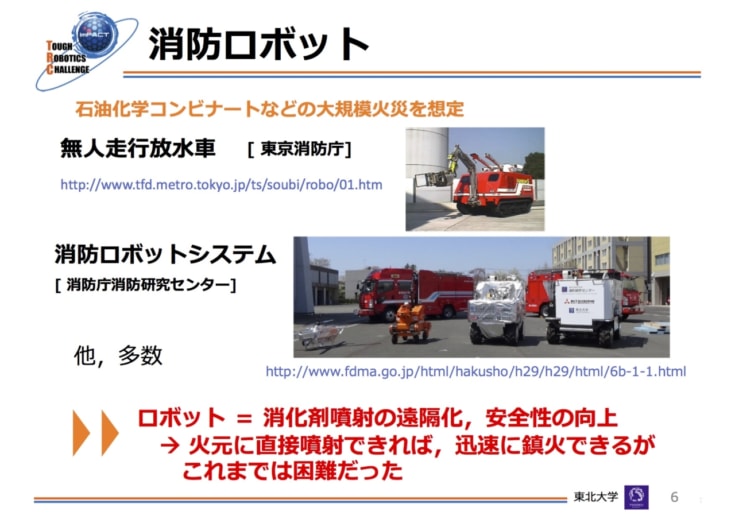
詳細については東北大学大学院 情報科学研究科 准教授 昆陽雅司氏が解説した。大規模火災においても火元に直接放水ができれば素早い消火が可能になる。これまでの消火ロボットは地面の上を走行するものがほとんどで、障害物が地面上にある場合は重量物を除去するロボットが必要だった。また高層ビルには到達できない。そこで飛行によって障害物を飛び越えることで迅速に鎮火を行うロボットを開発したという。
従来の消化ロボット
開発したプロトタイプロボットは全長約3m、2つのノズルモジュールを搭載している。
「ドラゴンファイヤーファイター」プロトタイプ。白い部分がノズルモジュール
水噴射による制御の検証を行った結果、根本を固定した場合に、およそ根本の高さと同じ高さまで浮上し、先端を左右に1.5m程度動かして火元にターゲットを定めることが可能で、水を噴射して消火が可能だった。毎分200リットルの水を先端から噴射する。
プロトタイプでは消化剤は使えないが、別流路を組み合わせることでバリエーションとしてはありえると考えているという。ホースの先端を根元以上の高さに浮上させることも可能だとしている。
ドラゴンファイヤーファイターのプロトタイプ概要
前進・後進の制御は噴射の方向を変えることで行う。将来的にはホースの送り出しを行うか、根元機構そのものをスライドさせることで前進・後進を行う。左右の動きは遠方のオペレーターがジョイスティックでコントロールできる。
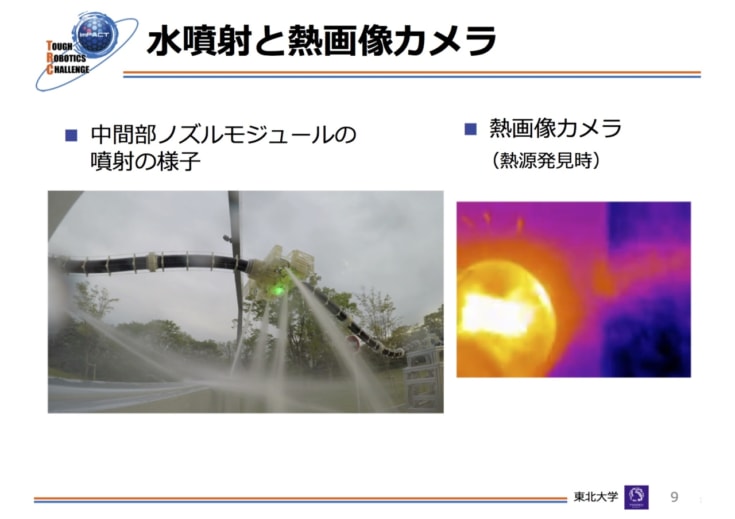
ノズルモジュールに搭載されているIMUを用いたホースの先端位置推定技術や、熱源を確認するための熱画像カメラなども用いられている。将来的には自律的にロボットが熱源を発見して自動消火する方向にも発展させることが可能。
水の噴射と熱画像カメラ映像
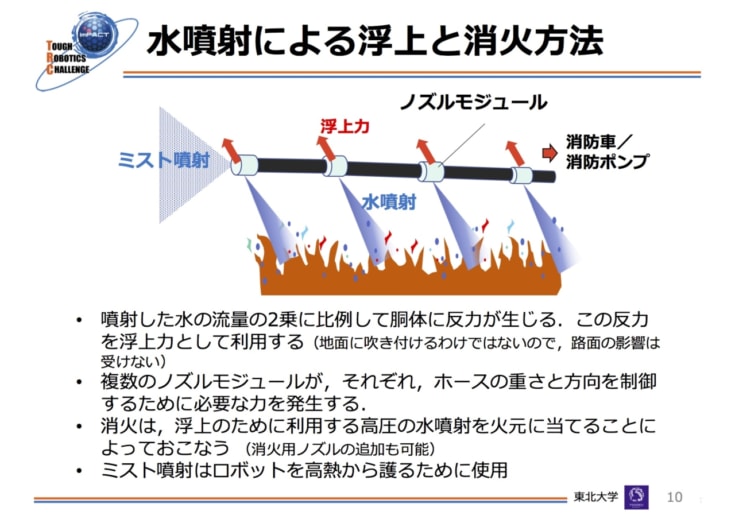
浮上には水噴射による反力を用いている。反力は水の流量の2乗に比例する。地面に噴射することで浮上しているわけではない。それぞれのノズルモジュールがそれぞれホースの重さと方向を制御するので、連結が可能。
水噴射による浮上
噴射する水を火元に与えることもできる。またロボットを火から守るためのミスト噴射も行なっている。
水噴射を巧みに制御してホースの空中姿勢を安定
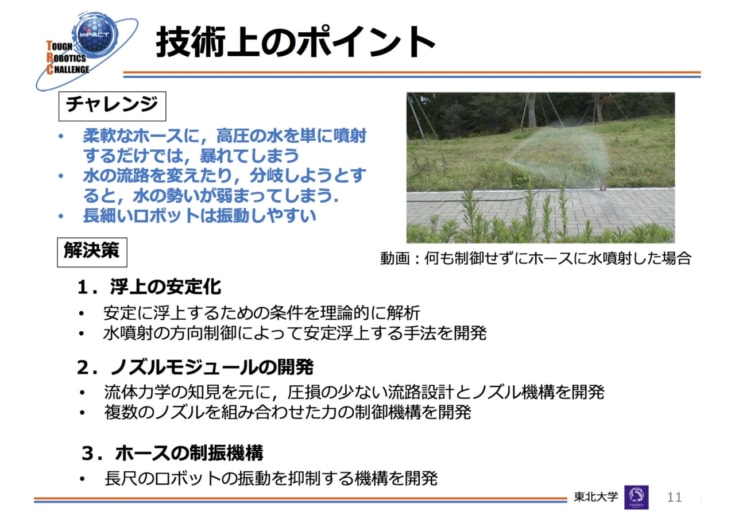
技術ポイントは安定化、ノズルモジュール開発、ホース制振機構の3つ
単純にホースから水を噴射するだけではホースが暴れてしまう。今回の技術のポイントの一つは、それを安定的に制御して浮上する方法を開発した点にある。また流体力学の知見をもとに、水の勢いを弱めることなく、水を分岐させて噴出させることができるようになった。本来揺れやすい長細い本体を安定化させる技術もポイントだった。
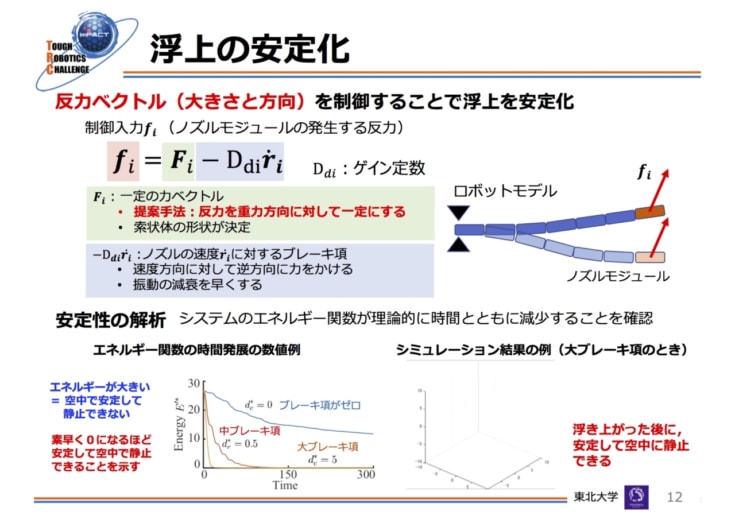
具体的には柔軟体のモデルを構築して、ロボットに加わる様々な力を解析。水噴射の方向を重力方向に対して一定に保ち続けることで、余分なエネルギーを取り除くことができ、安定的に浮上し続けることができることがわかった。
合力ベクトルによる浮上の安定化
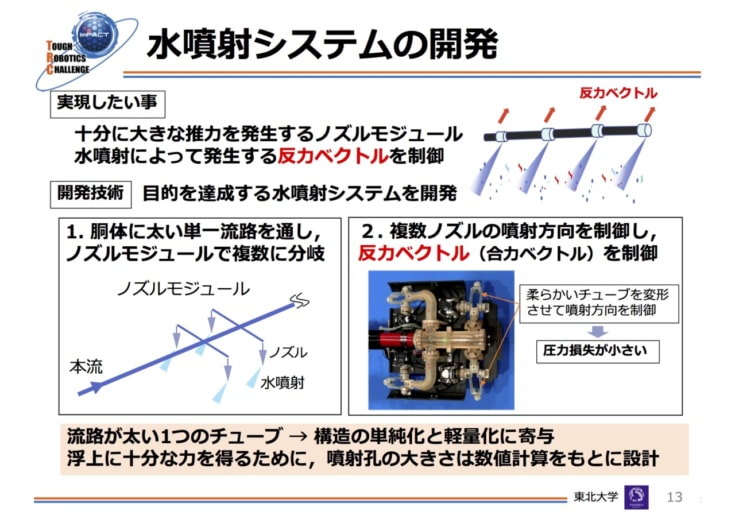
それを受けて十分に大きな推力を発生する(水噴射によって発生する反力ベクトルを制御できる)ノズルモジュールを開発した。なお水の供給は一本だけ。ノズルから噴射する水の量自体は一定のまま、複数ノズルの噴射方向を制御して合力ベクトルを制御するようにした。
水の噴射方向を制御できるノズルモジュールを開発
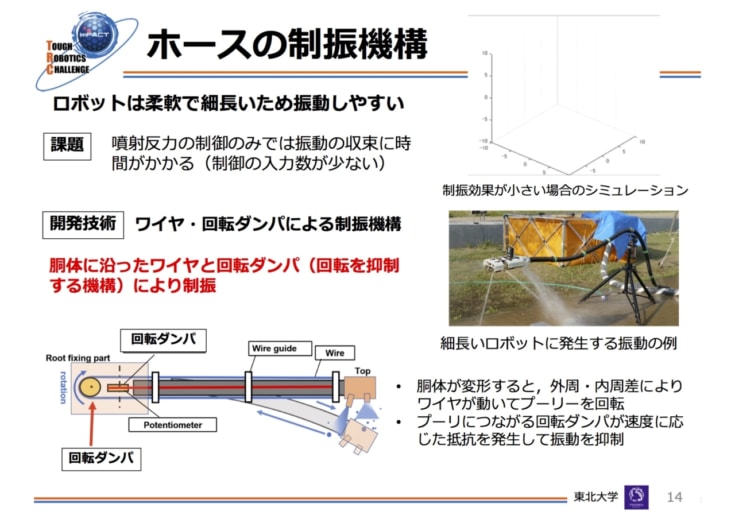
ホースの制振については、胴体に沿ったワイヤーと回転を抑制する回転ダンパを用いて制振した。胴体が変形すると、ワイヤーの長さが外周と内周で変化してプーリーを回転させるので、その動きを回転ダンパが速度に応じて抑制することで振動を抑える。
ホースの制振にはワイヤーと回転ダンパーを使用
今後は、10mから20m程度に長尺化、3年以内に現実の燃焼する建物に近い環境下で実用性を確認する。消防装備メーカーと協力しての事業化も目指す。
会見に同席した東北大学大学院 情報科学研究科 准教授 多田隈建二郎氏、東北大学大学院 情報科学研究科 助教 安部祐一氏、福島ハイテクプラザ主任研究員、社会人博士課程 安藤久人氏
なお名前は、中国の春節を祝う「龍舞(りゅうまい)」に由来する。「龍舞」は複数人が棒を突き上げて維持・制御している。その点が似ているからだという。今後は龍舞のように自由に消火ホースを空中で操ることを目指す。
名前の由来は中国の「龍舞」