デモプログラムを動かす
librealsense2-utilsにはいくつかのデモプログラムが含まれています。とりあえずいろいろ試せるのが
まず最初にRealSense本体を接続します。なお,
RealSenseを接続すると以下のようなメッセージがdmesgに表示されます。
$ dmesg | tail [ 4460.387462] usb 2-7: new SuperSpeed USB device number 2 using xhci_hcd [ 4460.404752] usb 2-7: New USB device found, idVendor=8086, idProduct=0b07 [ 4460.404780] usb 2-7: New USB device strings: Mfr=1, Product=2, SerialNumber=3 [ 4460.404785] usb 2-7: Product: Intel(R) RealSense(TM) 430 [ 4460.404790] usb 2-7: Manufacturer: Intel(R) RealSense(TM) 430 [ 4460.404795] usb 2-7: SerialNumber: 736313020779 [ 4460.408536] uvcvideo: Found UVC 1.50 device Intel(R) RealSense(TM) 430 (8086:0b07) [ 4460.411585] uvcvideo: Unable to create debugfs 2-2 directory. [ 4460.411902] input: Intel(R) RealSense(TM) 430 as /devices/pci0000:00/0000:00:14.0/usb2/2-7/2-7:1.0/input/input18 [ 4460.413902] uvcvideo: Found UVC 1.50 device Intel(R) RealSense(TM) 430 (8086:0b07) [ 4460.415026] uvcvideo: Unable to create debugfs 2-2 directory.
次にrealsense-viewerをデスクトップ環境で起動します。
$ realsense-viewer
図3 起動直後の画面
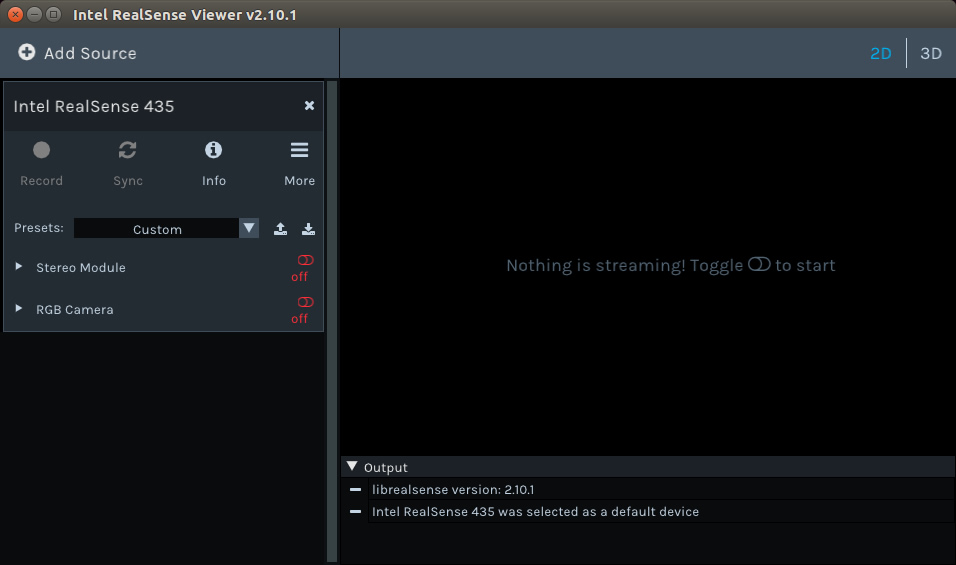
無事に起動すると左上に製品名が表示されます。ちなみに
「Streo Module」
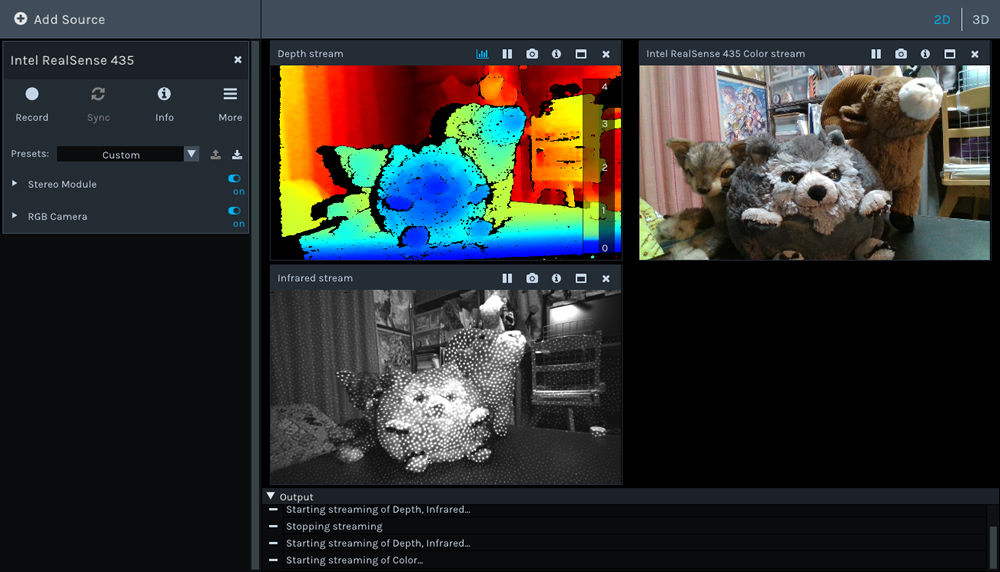
実際にカメラの前で物を動かすなどして,
図4 赤系が遠く,
他にもいくつかのツールが用意されています。
- rs-multicam: 深度情報とRGBカメラの結果だけを表示するシンプルなツールです。
- rs-measure: 画面上で指定した,
二箇所の地点間の距離を計測します。直線距離ではなく, 物体の形状に合わせた距離を計測するのがポイントです。 - rs-pointcloud: 撮影した情報から物体の位置情報をマップし,
画面をドラッグすることで別の角度から 「見る」 ことが可能になります。 - rs-align: 指定した距離より遠い物体をマスクするツールです。
- rs-enumerate-devices: デバイスの情報を表示します。
$ rs-enumerate-devices
Device info:
Name : Intel RealSense 435
Serial Number : 746512070435
Firmware Version : 05.08.15.00
Physical Port : /sys/devices/pci0000:00/0000:00:14.0/usb2/2-7/2-7:1.0/video4linux/video0
Debug Op Code : 15
Advanced Mode : YES
Product Id : 0B07
(中略)
Stream Profiles supported by Stereo Module
Supported modes: stream resolution fps format
Infrared 2 1280x800 @ 30Hz Y8
Infrared 1 1280x800 @ 30Hz Y8
Infrared 1 1280x800 @ 25Hz Y16
Infrared 2 1280x800 @ 25Hz Y16
Infrared 2 1280x800 @ 15Hz Y16
(中略)
Stream Profiles supported by RGB Camera
Supported modes: stream resolution fps format
Color 1920x1080 @ 30Hz RAW16
Color 1920x1080 @ 30Hz Y16
Color 1920x1080 @ 30Hz BGRA8
Color 1920x1080 @ 30Hz RGBA8
Color 1920x1080 @ 30Hz BGR8
Color 1920x1080 @ 30Hz RGB8
このように強力なデプスカメラであるRealSenseを使うと,