
経路探索問題を強化学習で解き、その過程をアニメーションで可視化しました。
↑↓で速度調節、Spaceで最速の学習、ドラッグ or タップで障害物の追加ができます。
これにより、強化学習で何をしているのか直観的に分かりやすくなりました。
問題設定
本アニメーションで可視化している問題の設定は、下記の通りです。
-
条件
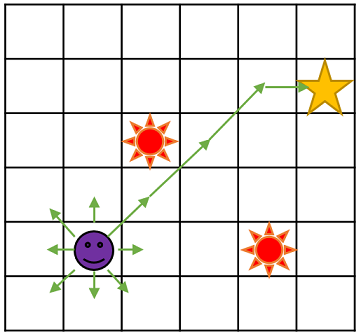
- のマスからなる離散的なフィールド
- 固定の初期位置と目標位置(⭐)、障害物が配置されている
- 障害物(🔴)は、踏んだら死ぬ。初期位置からやり直し
- 自機(👾)は単位時間に8方向のいずれかへ1マス移動できる
- 横移動と斜め移動のコストは同じ
- のマスからなる離散的なフィールド
-
得たい出力
- 初期位置から目標位置までの、障害物を回避した最短経路
この問題を強化学習のフレームワークに落とし込み、Qラーニングで求解しています。
詳細は後述します。
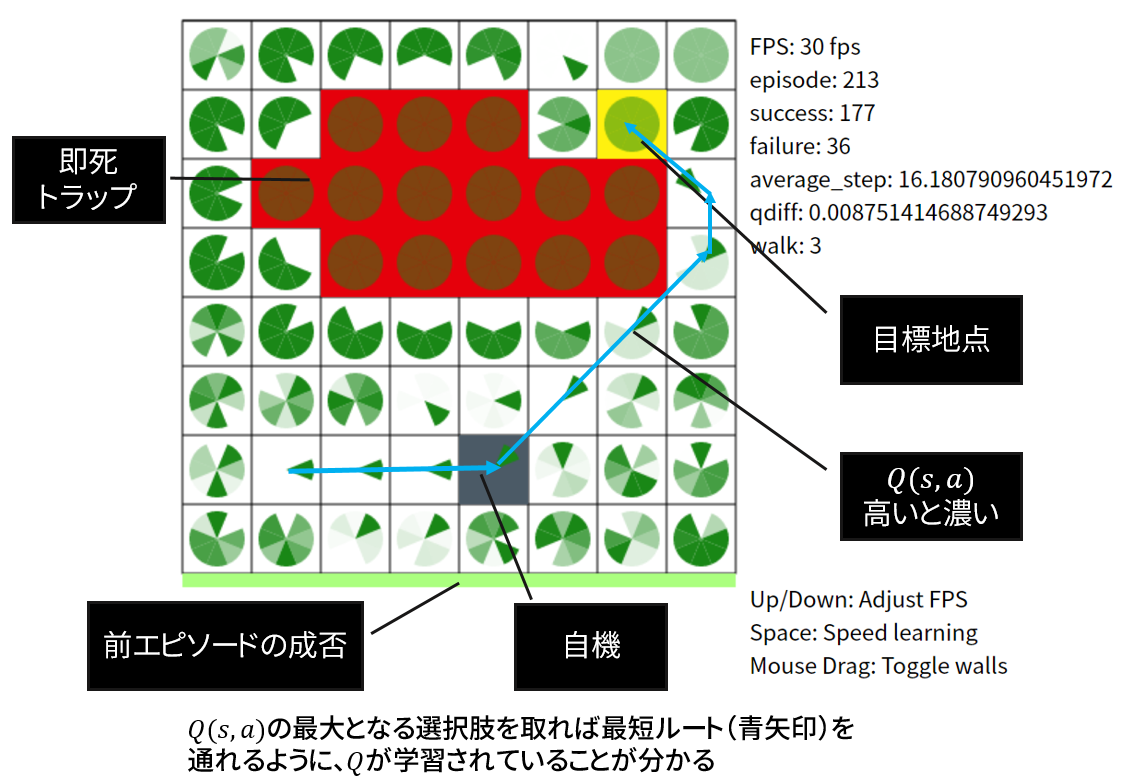
各インジケータの意味
本可視化の見方を説明します。
前節で述べた問題をQラーニングで解く過程を可視化しています。
詳細
上記の可視化で表現したかった数式などを説明します。
問題を強化学習のフレームワークに落とし込む
強化学習の用語を先に説明した経路探索問題に当てはめると、下記の対応となります:
- 状態 : 自機のいるマスの位置
- 行動 : 上下左右斜め8方向の内、進む方向
- 方策 : あるマス目において、どの方向へ進むか = 進むべき経路を示す
- 報酬 : あるマス目において、ある方向に移動した結果の評価
- 障害物を踏んだ → -100 の報酬を与える
- 目標位置に到達した → +50 の報酬を与える
- それ以外 → -1 の報酬を与える
この設定で強化学習を行うと、問題の解を得ることができます。
本可視化では、Qラーニングを用いて解いています。
数式で見る
各マスに表示されている緑パックマンのようなものは、行動価値関数の値の大きさを示します。
本問題においては、状態はマス目の位置、行動は8方向のどれかを示します。
行動価値関数とは、ある時刻において状態がのとき行動を取ったときに以後得られるリターンの期待値を表します(なるほどわからん)。
とにかく、が最大となるこそが、今後のリターンが一番大きいということで、における最適の行動であると言って良いでしょう。
実際、最適な行動価値関数が求まれば、最適方策は直ちに
と求めることができます。
方策 とは、状態のときに行動を取る確率を表すものなので、全てのについてそれぞれ行動価値関数が最大となる行動を常に(確率=1)取ることが最適な方策というわけです。
実際、本可視化におけるを見れば、進むと死ぬ方向や目標から遠ざかる方向はが小さく(薄く)なり、一方最短経路に従う方向はが大きく(濃く)評価されていることが見て取れますね。
ではどうすれば最適なを得られるんだという話になりますが、その一つの方法として下式に示すQラーニングを利用できます。
Qラーニングの解説記事はネットに沢山あるので、ここでは詳細を割愛することにします。
上式を実装してエピソードを重ねるうちに、は最適な値へ収束していきます。
収束した後はただ最適経路をなぞるのみということは、もう見ていただけたでしょう。
この行動価値関数を学習していくというイメージを持っていれば、強化学習の話題がもう少しとっつきやすくなるはずです。
一般に多くの問題ではやの空間が広大なので、今回のようなのテーブルに頼った手法は使えません。
代わりにを連続な関数として扱い、その関数を近似します。その関数近似に深層ニューラルネットワークを用いたのがDQNです。
つまり、結局原理は同じなわけですね!
まとめ
- 強化学習の一種であるQラーニングを用いて、経路探索問題を解いた
- 解く過程をアニメーションで可視化することで、仕組みが分かりやすくなった(はず!)
- ここで得られた強化学習のイメージは、古典的なQラーニングから割と最新のDQNにまで適用可能です
参考文献
-
UCLの講義資料
- ゼロから説明されていて、分かりやすいです
- Q学習に関連する話は第2回と第6回にあります
とてもおもしろかったです。
成功体験を何度も重ねてしまうと、状況が変わったときに迷走を続けて抜け出せない(walk 5万越えました)ところなんて、とても人間くさいですね