




for (j=0; j<4; j++){
r_int = (Y[j]<<8) + V[j]*359 - 45952;
g_int = (Y[j]<<8) - V[j]*183 - U[j]*88 + 34688;
b_int = (Y[j]<<8) + U[j]*454 - 58112;
if (r_int <0)
red = 0;
else if (((r_int)>>8)>=256)
red = 0xff;
else
red = (r_int)>>8;
if (g_int<0)
green = 0;
else if (((g_int)>>8)>=256)
green = 0xff;
else
green = (g_int)>>8;
if (b_int<0)
blue = 0;
else if (((b_int)>>8)>=256)
blue = 0xff;
else
blue = (b_int)>>8;
cam_red[(int)(i/640)][(int)((i%640)+j)] = red;
cam_green[(int)(i/640)][(int)((i%640)+j)] = green;
cam_blue[(int)(i/640)][(int)((i%640)+j)] = blue;
}










red = (char)((int)(((Y[j]<<8) + V[j]*359 - 45952)>>8)&0xff);
green = (char)(((int)((Y[j]<<8) - V[j]*183 - U[j]*88 + 34688)>>8)&0xff);
blue = (char)((int)(((Y[j]<<8) + U[j]*454 - 58112)>>8)&0xff);
// Camera_Capture.cpp : コンソール アプリケーションのエントリ ポイントを定義します。
//
#pragma warning(disable:4996)
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <iostream>
#include <cstring>
#include "stdafx.h"
int _tmain(int argc, _TCHAR* argv[])
{
char cam_file[100];
char **cam_red, **cam_green, **cam_blue; // 640*480ピクセル
BITMAPFILEHEADER bmpfh; // BMPファイルのファイルヘッダ
BITMAPINFOHEADER bmpih; // BMPファイルのINFOヘッダ
BMP24FORMAT **bmp_data; // 24ビットのBMPファイルのデータ 640*480
FILE *fcam, *fbmp;
int i, j, k;
char temp_buf[100], temp_buf2[100];
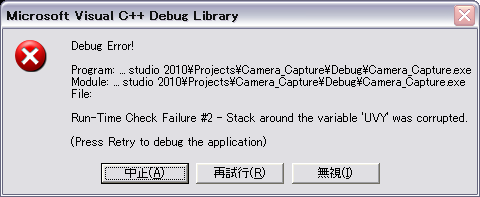
int U[4], V[4], Y[4];
char *str;
unsigned int UVY[8];
char red, green, blue;
// 引数の処理
if (argc == 1) { // 引数なし
strcpy_s(cam_file, "camera_capture_data.txt");
} else if (argc == 2){ //
strcpy_s(cam_file, (const char *)argv[1]);
} else {
fprintf(stderr, "Camera2BMP <camera_capture_data.txt>\n");
exit(1);
}
// メモリをアロケートする
if ((cam_red =(char **)malloc(sizeof(char *) * 480)) == NULL){
fprintf(stderr, "cam_redの1次元目480のメモリを確保できません\n");
exit(1);
}
if ((cam_green =(char **)malloc(sizeof(char *) * 480)) == NULL){
fprintf(stderr, "cam_greenの1次元目480のメモリを確保できません\n");
exit(1);
}
if ((cam_blue =(char **)malloc(sizeof(char *) * 480)) == NULL){
fprintf(stderr, "cam_blueの1次元目480のメモリを確保できません\n");
exit(1);
}
for (i=0; i<480; i++){
if ((cam_red[i]=(char *)malloc(sizeof(char) * 640)) == NULL){
fprintf(stderr, "cam_redの2次元目の%d番目のメモリが確保できません\n", i);
exit(1);
}
}
for (i=0; i<480; i++){
if ((cam_green[i]=(char *)malloc(sizeof(char) * 640)) == NULL){
fprintf(stderr, "cam_greenの2次元目の%d番目のメモリが確保できません\n", i);
exit(1);
}
}
for (i=0; i<480; i++){
if ((cam_blue[i]=(char *)malloc(sizeof(char) * 640)) == NULL){
fprintf(stderr, "cam_blueの2次元目の%d番目のメモリが確保できません\n", i);
exit(1);
}
}
if ((bmp_data=(BMP24FORMAT **)malloc(sizeof(BMP24FORMAT *)*480)) == NULL){
fprintf(stderr, "bmp_dataの1次元目の480のメモリを確保できません\n");
exit(1);
}
for (i=0; i<480; i++){
if ((bmp_data[i]=(BMP24FORMAT *)malloc(sizeof(BMP24FORMAT) * 640)) == NULL){
fprintf(stderr, "bmp_dataの2次元目の%d番目のメモリが確保できません\n", i);
exit(1);
}
}
// cam_fileをtext readモードでオープン
if ((fcam = fopen(cam_file, "rt")) == NULL) {
fprintf(stderr, "Can't Open %s\n", cam_file);
exit(1);
}
// cam_fileの読み込み
for (i=0; i<307200; i=i+4){
if ((k=fscanf(fcam,"%s\n", temp_buf)) == EOF){
fprintf(stderr, "%s のデータが足りない。%d\n", cam_file, i);
exit(1);
} else if (k == 0){
fprintf(stderr, "%s のデータフォーマットがエラー\n", cam_file);
exit(1);
}
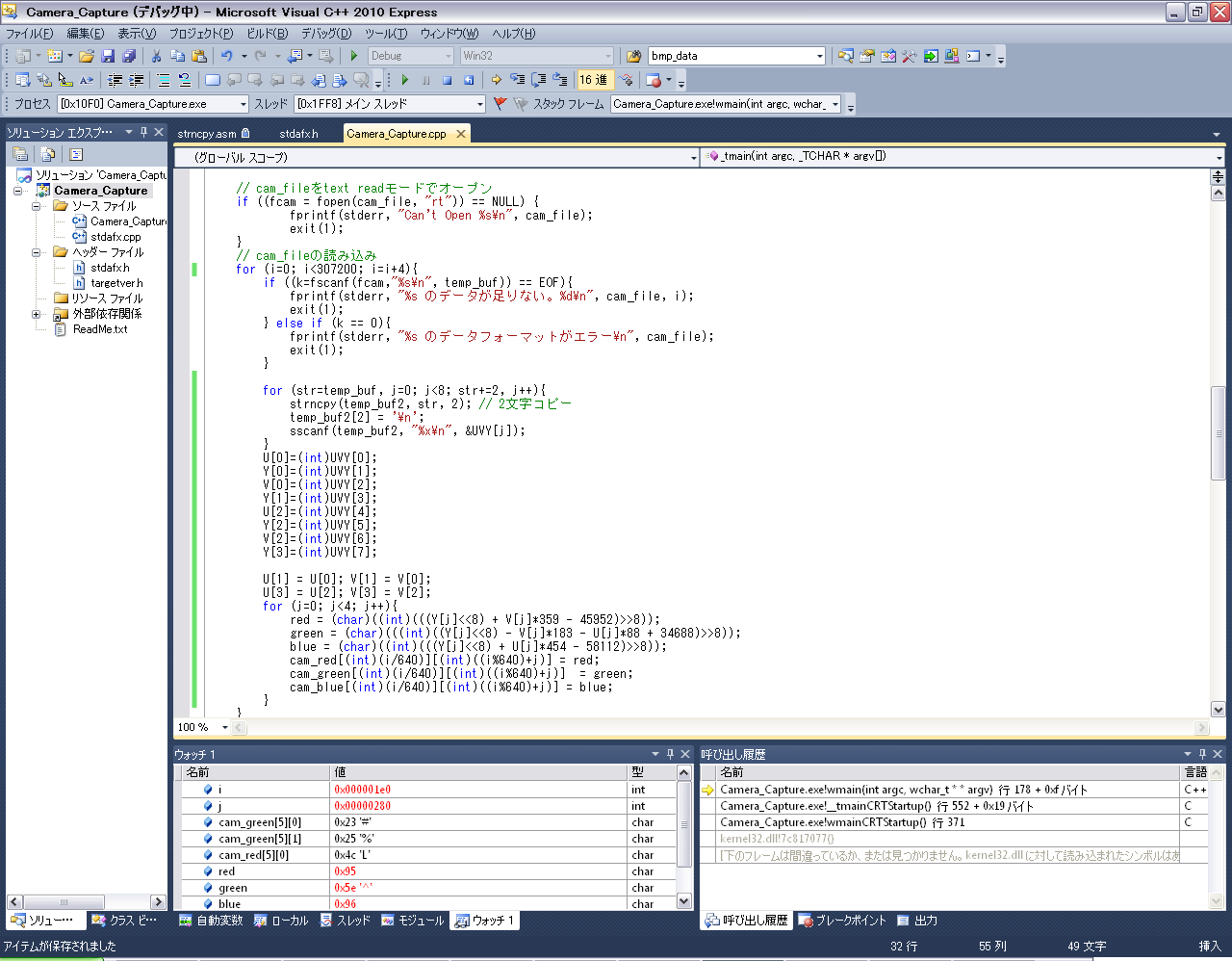
for (str=temp_buf, j=0; j<8; str+=2, j++){
strncpy(temp_buf2, str, 2); // 2文字コピー
temp_buf2[2] = '\n';
sscanf(temp_buf2, "%x\n", &UVY[j]);
}
U[0]=UVY[0];
Y[0]=UVY[1];
V[0]=UVY[2];
Y[1]=UVY[3];
U[2]=UVY[4];
Y[2]=UVY[5];
V[2]=UVY[6];
Y[3]=UVY[7];
U[1] = U[0]; V[1] = V[0];
U[3] = U[2]; V[3] = V[2];
for (j=0; j<4; j++){
red = (char)((int)(((Y[j]<<8) + V[j]*359 - 45952)>>8)&0xff);
green = (char)(((int)((Y[j]<<8) - V[j]*183 - U[j]*88 + 34688)>>8)&0xff);
blue = (char)((int)(((Y[j]<<8) + U[j]*454 - 58112)>>8)&0xff);
cam_red[(int)(i/640)][(int)((i%640)+j)] = red;
cam_green[(int)(i/640)][(int)((i%640)+j)] = green;
cam_blue[(int)(i/640)][(int)((i%640)+j)] = blue;
}
}
// cam_dataに読み込んだカメラのカラーデータをbmp_dataにをコピー(その際にBMPのデータは左下から始まる)
for (i=0; i<480; i++){
for (j=0; j<640; j++){
bmp_data[479-i][j].red = cam_red[i][j];
bmp_data[479-i][j].green = cam_green[i][j];
bmp_data[479-i][j].blue = cam_blue[i][j];
}
}
fclose(fcam);
// BMPファイルのファイルヘッダに値を代入
bmpfh.bfType = 0x4d42;
bmpfh.bfSize = 640*480*3+54;
bmpfh.bfReserved1 = 0;
bmpfh.bfReserved2 = 0;
bmpfh.bfOffBits = 0x36;
// BMPファイルのINFOヘッダに値を代入
bmpih.biSize = 0x28;
bmpih.biWidth = 640;
bmpih.biHeight = 480;
bmpih.biPlanes = 0x1;
bmpih.biBitCount = 24;
bmpih.biCompression = 0;
bmpih.biSizeImage = 0;
bmpih.biXPixPerMeter = 3779;
bmpih.biYPixPerMeter = 3779;
bmpih.biClrUsed = 0;
bmpih.biClrImporant = 0;
// bmpファイルに書き出す
if ((fbmp=fopen("cam_bmp_file.bmp", "wb")) == NULL){
fprintf(stderr, "cam_bmp_file.bmpがバイナリライトモードで開けません\n");
exit(1);
}
// BMPファイルヘッダの書き込み
fwrite(&bmpfh.bfType, sizeof(char), 2, fbmp);
fwrite(&bmpfh.bfSize, sizeof(long), 1, fbmp);
fwrite(&bmpfh.bfReserved1, sizeof(short), 1, fbmp);
fwrite(&bmpfh.bfReserved2, sizeof(short), 1, fbmp);
fwrite(&bmpfh.bfOffBits, sizeof(long), 1, fbmp);
// BMPファイルのINFOヘッダの書き込み
fwrite(&bmpih, sizeof(BITMAPINFOHEADER), 1, fbmp);
// bmp_dataの書き込み
for (i=0; i<480; i++) {
for (j=0; j<640; j++) {
fputc((int)bmp_data[i][j].blue, fbmp);
fputc((int)bmp_data[i][j].green, fbmp);
fputc((int)bmp_data[i][j].red, fbmp);
}
}
fclose(fbmp);
for(i=0; i<480; i++){
free(cam_red[i]);
free(cam_green[i]);
free(cam_blue[i]);
free(bmp_data[i]);
}
free(cam_red);
free(cam_green);
free(cam_blue);
free(bmp_data);
return 0;
}
// stdafx.h : 標準のシステム インクルード ファイルのインクルード ファイル、または
// 参照回数が多く、かつあまり変更されない、プロジェクト専用のインクルード ファイル
// を記述します。
//
#pragma once
#include "targetver.h"
#include <stdio.h>
#include <tchar.h>
// TODO: プログラムに必要な追加ヘッダーをここで参照してください。
// BITMAPFILEHEADER 14bytes
typedef struct tagBITMAPFILEHEADER {
unsigned short bfType;
unsigned long bfSize;
unsigned short bfReserved1;
unsigned short bfReserved2;
unsigned long bfOffBits;
} BITMAPFILEHEADER;
// BITMAPINFOHEADER 40bytes
typedef struct tagBITMAPINFOHEADER{
unsigned long biSize;
long biWidth;
long biHeight;
unsigned short biPlanes;
unsigned short biBitCount;
unsigned long biCompression;
unsigned long biSizeImage;
long biXPixPerMeter;
long biYPixPerMeter;
unsigned long biClrUsed;
unsigned long biClrImporant;
} BITMAPINFOHEADER;
typedef struct BMP24bitsFORMAT {
unsigned char blue;
unsigned char green;
unsigned char red;
} BMP24FORMAT;
SW_Controller #(
.frequency_KHz(25000))
SW_CONT_inst(
.clk(clk_cam),
.reset(reset_cam),
.sw0(sw0),
.sw1(sw1),
.sw0_out(capture_ena),
.sw1_out(vio_on)
);
CamCaptICON CamCaptICON_inst (
.CONTROL0(control0) // INOUT BUS [35:0]
);
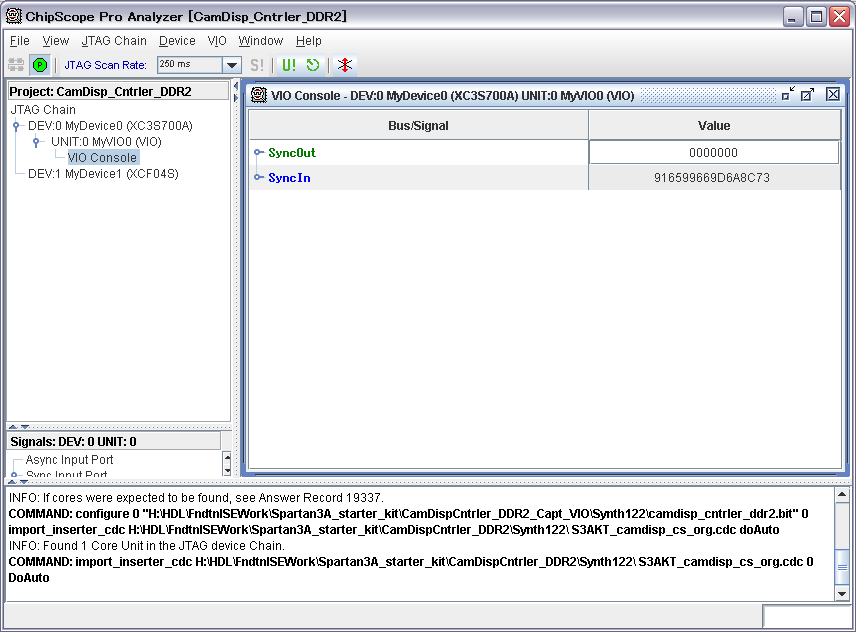
CamCaptVIO CamCaptVIO_inst (
.CONTROL(control0), // INOUT BUS [35:0]
.CLK(clk_ddr2), // IN
.SYNC_IN(sync_in), // IN BUS [63:0]
.SYNC_OUT(sync_out) // OUT BUS [24:0]
);
// sync_outの変化を検知してvio_addr_we を出力する
always @(posedge clk_ddr2) begin
if (reset_ddr2) begin
sync_out_reg1 <= 25'd0;
sync_out_reg2 <= 25'd0;
end else begin
sync_out_reg1 <= sync_out;
sync_out_reg2 <= sync_out_reg1;
end
end
always @* begin
if (sync_out_reg1 != sync_out_reg2) // 以前の値と異なるとき
vio_addr_we <= 1'b1;
else
vio_addr_we <= 1'b0;
end
// first_dword VIOの最初の32ビット
always @(posedge clk_ddr2) begin
if (reset_ddr2)
first_dword <= 1'b1;
else begin
if (vio_on && ddr2_rddata_valid)
first_dword <= 1'b0;
else
first_dword <= 1'b1;
end
end
// sync_in 処理
always @(posedge clk_ddr2) begin
if (reset_ddr2)
sync_in <= 64'd0;
else begin
if (vio_on & first_dword && ddr2_rddata_valid) begin
sync_in[63:32] <= ddr2_output_data;
end
if (vio_on & ~first_dword && ddr2_rddata_valid) begin
sync_in[31:0] <= ddr2_output_data;
end
end
end


| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
|---|---|---|---|---|---|---|
| - | - | - | - | 1 | 2 | 3 |
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | - | - | - |
© FPGAの部屋. Powered By fc2. Designed by WEBブログデザイナー

