2017年5月11日 木曜日
技術・商品
大林組/水中インフラ点検ロボ開発/姿勢制御機能を搭載、鮮明な映像撮影可能 [2017年5月11日3面]
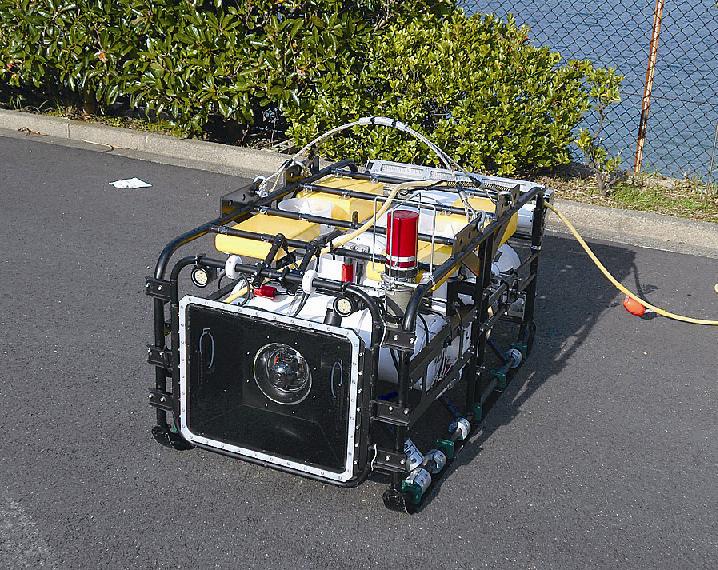
重量は約130kgで4人で持ち運びができる
大林組は10日、地上や船上からの遠隔操作が可能な水中インフラ点検用の無人潜水機(ROV)を開発したと発表した。ジャイロ効果を利用した姿勢制御装置を搭載。水流による機体の揺れを抑え、ほぼ静止した状態で対象物を撮影できる。潜水士による点検では水深約40メートルが限界だったが、ROVは100メートルまでの潜水が可能で、水上からの電源供給により長時間の稼働も実現する。
ダムや護岸など水中構造物の補修工事では、事前にひび割れの有無や程度などを調査する必要がある。従来は潜水士が水中に潜り、目視で点検して写真などを撮影していたが、作業時間の制限や潜水深度に限界があるため、連続して安全に点検ができるロボットへの期待が高まっている。
開発した「ディアグ」は、幅780ミリ、奥行き1508ミリ、高さ711ミリで重量は約130キロ。ジャイロ効果を利用した独自の姿勢制御装置「アクアジャスター」のほか、カメラ、水中探査ソナー、ケレン装置、スラスターなどで構成する。
地上や船上からコントローラーで機体を操作する。撮影画像を解析することにより、水中の白色浮遊物などを自動で除去した上でモニターに表示されるため、濁水の中でもリアルタイムに鮮明な映像を見ることができる。
地上に設置した測量器と作業船に装備している無線中継器(トランスポンダー)により、機体の位置情報を常に把握でき、点検箇所に機体を短時間で到達させることが可能だ。
機体からラインレーザーを照射し、ひび割れなどの寸法を計測すると同時に、機体の位置情報を活用してひび割れのある位置を記録することもできるという。
国土交通省の「次世代社会インフラ用ロボット技術・ロボットシステム」の公募で採択され、実証を重ねた結果、最高ランクの評価を獲得した。
同社は、ダム全体の構造体の状況を一目で確認できるモザイクマップの作成を視野に入れ、ディアグがダムの壁面を向いたままで平行移動し、記録ができるよう改良を進めている。ダムや護岸のほか、洋上風車の基礎部分など、さまざまな水中構造物の点検に積極的に活用していく。
ダムや護岸など水中構造物の補修工事では、事前にひび割れの有無や程度などを調査する必要がある。従来は潜水士が水中に潜り、目視で点検して写真などを撮影していたが、作業時間の制限や潜水深度に限界があるため、連続して安全に点検ができるロボットへの期待が高まっている。
開発した「ディアグ」は、幅780ミリ、奥行き1508ミリ、高さ711ミリで重量は約130キロ。ジャイロ効果を利用した独自の姿勢制御装置「アクアジャスター」のほか、カメラ、水中探査ソナー、ケレン装置、スラスターなどで構成する。
地上や船上からコントローラーで機体を操作する。撮影画像を解析することにより、水中の白色浮遊物などを自動で除去した上でモニターに表示されるため、濁水の中でもリアルタイムに鮮明な映像を見ることができる。
地上に設置した測量器と作業船に装備している無線中継器(トランスポンダー)により、機体の位置情報を常に把握でき、点検箇所に機体を短時間で到達させることが可能だ。
機体からラインレーザーを照射し、ひび割れなどの寸法を計測すると同時に、機体の位置情報を活用してひび割れのある位置を記録することもできるという。
国土交通省の「次世代社会インフラ用ロボット技術・ロボットシステム」の公募で採択され、実証を重ねた結果、最高ランクの評価を獲得した。
同社は、ダム全体の構造体の状況を一目で確認できるモザイクマップの作成を視野に入れ、ディアグがダムの壁面を向いたままで平行移動し、記録ができるよう改良を進めている。ダムや護岸のほか、洋上風車の基礎部分など、さまざまな水中構造物の点検に積極的に活用していく。
このジャンルの最新記事
- 戸田建設/耐震性とフレキシブルな内部空間実現へ/足柄上合同庁舎本館新築に独自技術 [2017年5月9日3面]
- カナモトら3社/建機の人型操作ロボット開発/危険地域でも作業可能に [2017年5月8日3面]
- 積水ハウスら/不動産情報管理にブロックチェーン技術活用/入居契約管理で運用開始へ [2017年5月2日3面]
- 西松建設/耐荷重性高いLSG壁工法を開発/中間梁なしで最大7・7メートル実現 [2017年4月27日3面]
- 西松建設、宇部エクシモ/コンクリート用養生シート開発/貼るだけで保温・保湿効果 [2017年4月26日3面]
DVD 道路工事の労働災害・公衆災害
安全教育用DVD「つくる!安全現場の一年...続きを読む
国際標準型アセットマネジメントの方法
インフラ資産のアセットマネジメント全体の...続きを読む
DVD 新版 つくる!安全現場の1年
「サイバーセキュリティ月間」の新コンテン...続きを読む
タイムライン―日本の防災対策が変わる
風水害などの防災対策として全国の地方自治...続きを読む
DVD 職長が語る!予定外作業の悲劇
安全教育用DVD「つくる!安全現場の一年...続きを読む