- この記事は自分用の備忘録です。解説用ではないです
きっかけ
カメラから画像を取得して、それを反転させて表示するプログラムを開発しています。
画像の反転をOpenCVを使っているのですが、画素数が大きいのでもう少しなんとか早くならないものかと、取り組んでみました。
cv::flip(img, img, 1);
残念ながら、私が使っているデバイスのCPUは、OpenCLをサポートしていない、ので、GPUにデータを乗っける方法が使えないのです。
使えたら、OpenCV3で、高速化してしまうんですけどね。
ということで、イバラの道としりながら、アセンブリ言語に進んでいきます。
NEON命令
NEON命令とは、arm系CPUにおいて、1命令で複数データをまとめて処理できる命令だそうです。
どうゆうことか、というのは、下のスライドが分かりやすいです。
組み込み関数(intrinsic)によるSIMD入門
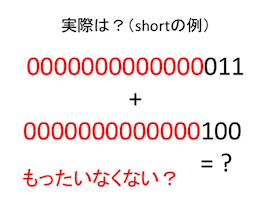
単純に話をすると、128bitでまとめて計算できるのに、8bitしか使わないのはもったいなくない?という話。
それをarm cpuで巧く使う命令が、NEON命令だそうです。
ベクトル処理
ベクトル処理とは、複数のデータを並列に扱う処理だそうです。
(AndroidNDKネイティブプログラミング第2版 より)
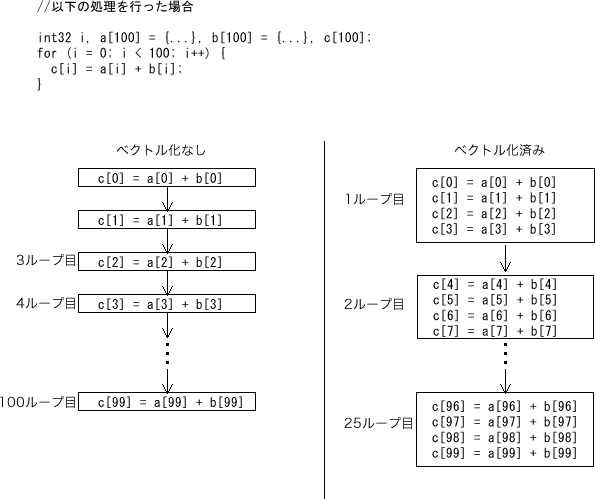
ベクトル化するのは、c++コンパイラがやってくれます。
Androidの場合、Android.mkに指定しておけばいいです。
LOCAL_CPPFLAGS += -O3 # optimize level
LOCAL_CPPFLAGS += -mfpu=neon # use NEON
LOCAL_CPPFLAGS += -ftree-vectorize # use NEON
LOCAL_CPPFLAGS += -march=armv7-a
LOCAL_CPPFLAGS += -mvectorize-with-neon-quad # Use Q register(128bit) instead of D register(64bit)
LOCAL_CPPFLAGS += -mcpu=cortex-a9
LOCAL_CFLAGS += -mcpu=cortex-a9
LOCAL_ARM_MODE := arm
LOCAL_ARM_NEON := true
ARCH_ARM_HAVE_NEON := true
LOCAL_CPPFLAGS += -funwind-tables
ベクトル化されやすいコード
NEON命令を利用して、ベクトル化されやすいコードは、こんな感じらしいです。
大きいループよりも小さいループを作るのがコツらしいです。
int a[256], b[256], c[256];
foo () {
int i;
for (i = 0; i < 256; i++) {
a[i] = b[i] + c[i];
}
}
typedef int aint __attribute__ ((__aligned__(16)));
foo (int n, aint * __restrict__ p, aint * __restrict q) {
while (n--) {
**p++ = *q++;
}
}
横方向反転をさせる(c++)
c++で画像を横反転させるプログラムはこんな感じです。
typedef struct {
unsigned char *data;
int width;
int height;
int bpp;
int size;
} image_t;
void hflip_c(image_t *image) {
uint32_t *left;
uint32_t *right;
uint32_t tmp;
int x, y, width;
int half = image->width / 2;
left = (uint32_t*)image->data;
right = left + image->width - 1;
for (y = 0; y < image->height ; y++) {
for (x = 0; x < half; x++) {
tmp = *right;
*right = *left;
*left = tmp;
left++;
right--;
}
left += half;
right = left + image->width;
}
}
左半分のピクセルを右半分と入れ替えていくだけです。
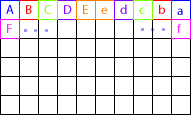
A ⇔ a
B ⇔ b
C ⇔ c
...
1920x1080の画像を反転してみると、約13ms
おっ、OpenCVよりもちょっとだけ早くなった。
インラインアセンブリ言語で書いてみる
ret = a + bのアセンブリコード
そもそもc++からアセンブリ言語を呼び出す方法が分かりませんでした。
c++で ret = a + bを行うコードはこんな感じです。
int test() {
int ret = 0;
// ret = a + b
__asm__ __volatile__ ( // <---(1)
"add %[result], %[val1], %[val2]\n\t" // <---(2)
: [result]"=r"(ret) // <---(3)
: [val1]"r"(a), [val2]"r"(b) // <---(4)
);
return ret;
}
(1) インラインアセンブリ言語は、__asm__()関数として記述するそうです。asm()でもいいみたい。
__volatile__宣言は、コンパイラに最適化しないで!という宣言だそうです。これをしないと、コンパイラに無駄!と判断されたコードが自動的に排除されることがあるそうです。
volatile宣言については、C++ volatile調査。局所的な最適化阻止が分かりやすかったです。
(2) アセンブリ言語の命令を書いていく。通常はレジスタを指定して演算を行うが、上記のサンプルコードでは分かりやすくするためにラベルを指定しています。ラベルはコンパイラ(or アセンブラ)によってレジスタに置き換えられます。
(3) 出力するラベルと変数名を指定します。[result]"r="(ret)は、c++の変数であるretの値をインラインアセンブリ言語のラベル"result"に割り当てるように指定しています。"r"はレジスタに出力する指定で、"="は、書き込み専用の変数という意味だそうです。
(4) 入力の変数とラベルを指定しています。ここでは変数aをラベル"val1"として参照、変数bはラベル"val2"として参照可能だということを指定しています。
もう少し解説
上記のサンプルと説明は、AndroidNDKネイティブプログラミング第2版 より引用しています。
さて上記を読むと分かったつもりになりますが、いまいちよく分かりません。
追加で調べたので書いておきます。
asm()関数
asm関数は、次のような引数を取ります。
__asm__ (
"アセンブリコード1"
"アセンブリコード2"
"アセンブリコード3"
"アセンブリコード4"
"アセンブリコード5"
: // 出力用変数を指定する
: // 入力用変数を指定する
: // 上書きレジスタ
「上書きレジスタ」とは、アセンブリコード中で使用するレジスタを宣言しています。
ここで指定しておくと、アセンブリコードが実行される前にその内容がスタックに退避されて、実行終了後にもとの値に戻されます。
実はこれ、かなりハマリポイントでした。
コンパイラはc++のコードを最終的には機械語に翻訳します。
機械語はアセンブリコードと1対1です。
c++コンパイラが、なにかのコードを実行するときは、当然ながらレジスタと呼ばれるCPU内部にあるメモリを使用します。
そこにインラインアセンブリ言語のコードが実行されて、レジスタを上書きしてしまうと、本来の値とは違う値が入っているので不具合が発生してしまうのです。
イメージで言うと、こんな感じ。

アセンブリコード
アセンブリ言語のフォーマットは、空白で区切られます。
基本的には1行に1命令だけを書きます。
(ラベル) 命令 オペランド1, オペランド2
具体的にはこんな感じです。
int total = 0;
int limit = 10;
__asm__ (
" MOV r0, #0\n" // レジスタr0 に 数値 0 をコピーする
" MOV r1, %[Rs1]\n" // レジスタr1 に ラベル[Rs1] の内容をコピーする
"loop:\n" // ジャンプするためのラベル
" ADD r0, r0, r1\n" // r0 = r0 + r1
" SUBS r1, r1, #1\n" // r1 = r1 - 1
" BGE loop\n" // if (r1 > 0), loopに行く
" MOV %[Rd], r0\n" // ラベル[Rd]に レジスタr0 の内容をコピーする
: [Rd] "=r" (total) // コンパイラに ラベル[Rd] は、c++変数のtotalであると教える。
// "=r"で書き込み専用であることを宣言する
: [Rs1] "r" (limit) // コンパイラに ラベル[Rs1] は、c++変数のlimitであると教える
: "r0, "r1" // レジスタr0 とr1を使用する旨を宣言しておいて、レジスタを保護する
);
return total;
っていうかレジスタってなに?
レジスタとは、CPU内部にある高速だけど小容量のメモリです。
CPU内部、つまりチップの中にあります。
CPUから見て、外部のメモリ(RAMとか)にアクセスするのは遅いです。
DDR3を使っていようがなんであろうが、とにかく遅いんです。
レジスタは、CPUの中にあるから早いのです。
レジスタは arm CPUの場合、
- 自由に使えるr0〜r12、
- 用途が決まっているr13〜r15、
- CPUの状態を示す特別なレジスタcpsr
があります。
この他に、arm CPUでNEON命令をサポートしている場合、NEON命令で使用するためのQレジスタ、Dレジスタがあります。
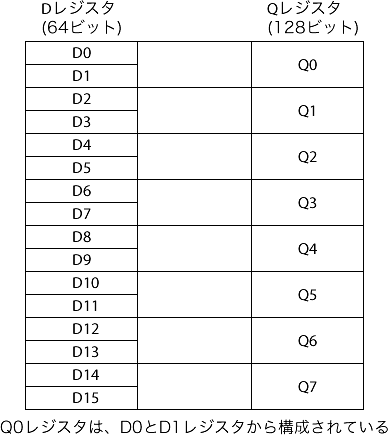
NEON命令ってなんのか、っていうと、「このQレジスタをまとめて計算してくれる命令」なんです。
このQレジスタをうまく活用することが、高速化に繋がります。
本気で知りたいと思う方は、ARMで学ぶ アセンブリ言語入門 が分かりやすかったです。
横方向反転をさせる(c++ + アセンブリコード)
話を元に戻して、画像の反転をしてみます。
といっても、最初はよくわからなかったので、いろいろ読み漁りました。
最終的には、ARM NEON命令を使って画像の回転 が参考になりました。
void hflip_neon(image_t *image)
{
int width = image->width;
int i = width / 16;
uint32_t *left = (uint32_t *)image->data;
uint32_t *right = left + image->width - 8;
int y = image->height - 1;
__asm__ (
"0:\n"
" mov r4, %2\n" // r4 = width(%2)
" lsr r1, r4, #4\n" // i(r1) = r4 / 2
" lsl r3, r4, #1\n" // nextLine = width(%2) * 2
" lsl r2, r3, #1\n" // offsetRight = nextLine(r3) * 2
" sub r2, r2, #32\n" // offsetRight = offsetRight - 32
"1:\n"
" pld [%0, #64]\n" // preload 64bits(8bytes) from src
" pld [%1, #64]\n" // preload 64bits(8bytes) from dst
" vld1.64 {d0-d3}, [%0]\n" // left -> {d0-d3}
" vld1.64 {d4-d7}, [%1]\n" // right -> {d4-d7}
// for debug
//" vmov.i64 d4, #0xFF0000FFFF00FF00\n" //Red-Green
//" vmov.i64 d5, #0xFFFF0000FF000000\n" //Blue-Black
//" vmov.i64 d6, #0xFFFFFFFFFFFFFFFF\n" //white
//" vmov.i64 d7, #0xFF00FFFFFF00FFFF\n" //yellow
" vrev64.32 d8, d3\n"
" vrev64.32 d9, d2\n"
" vrev64.32 d10, d1\n"
" vrev64.32 d11, d0\n"
" vrev64.32 d12, d7\n"
" vrev64.32 d13, d6\n"
" vrev64.32 d14, d5\n"
" vrev64.32 d15, d4\n"
" vst1.64 {d8-d11}, [%1]\n" // {d0-d3} -> right
" vst1.64 {d12-d15}, [%0]\n" // {d4-d7} -> left
" add %0, %0, #32\n" // left(%0) = left(%0) + 64
" sub %1, %1, #32\n" // right(%1) = right(%1) - 64
" subs r1, r1, #1\n" // i(r1) = i(r1) - 1
" bne 1b\n" // if i(r1) > 0, then goto 1:
" add %0, %0, r3\n" // left(%0) = left(%0) + nextLine(r3)
" add %1, %0, r2\n" // right(%1) = left(%1) + offsetRight(r2)
" subs %3, %3, #1\n" // y(%3) = y(%3) - 1
" bne 0b\n" // if y(%3) > 0, then goto 0:
:
: "r"(left), "r"(right), "r"(width), "r"(y)
: "q0","q1","q2","q3", "q4","q5","q6","q7", "r1", "r2", "r3", "r4");
}
1920x1080の画像を反転してみると、約8ms
おおっ!早いね!
ほんとに早いの?(結果発表)
さて、c++ユーザーならお気づきでしょう。そう、最適化オプションです。
やはりこいつを有効にして比較しないと、意味ないでしょう。
コンパイラの最適化なし (-O0)
| 方法 | 時間 |
|---|---|
| OpenCV(3.1) | 約16ms |
| c++ | 約13ms |
| assembly (neon) | 約8ms |
コンパイラの最適化あり (-O3)
| 方法 | 時間 |
|---|---|
| OpenCV(3.1) | 約16ms |
| c++ | 約7ms |
| assembly (neon) | 約8ms |
あれ、c++のが早くない。。。
何度も試しましたが、c++とアセンブリコードと同等か、c++のがちょっとだけ早いです。
なんで?
組み込み関数(intrinsic)によるSIMD入門の9枚目のスライドで解説されてますが、メモリコピーだけならc++と比較しても差がないようです。

まとめ
ということで、「あえて無理にインラインアセンブリコードを書かなくても、c++でベクトル化を意識してコードを書けば、
十分に早くなる」という結果になりましたね。
インラインアセンブリコードを書くと、アセンブリ言語が読めないとコードのデバッグが出来ない、ということで
求められるスキルレベルが一気に上がります。
なので一般のプロジェクトで使うには向かないかも。
でもスライドによると、「色変換で数倍の高速化(色変換1 5.7倍)」となってますね。
引き続き、後日検証してみます。